USV AUV colab
[ICASSP 2025] Python implementation of the paper "USV-AUV Collaboration Framework for Underwater tasks under Extreme Sea Conditions"."
This repository contains python code implementation of the paper "USV-AUV Collaboration Framework for Underwater tasks under Extreme Sea Conditions". The project is written primarily in Python, first published in 2024. Key topics include: marine-robotics, reinforcement-learning, underwater-acoustics.
[ICASSP 2025] USV-AUV-colab
![]()
![]()

This repository contains python code implementation of the paper "USV-AUV Collaboration Framework for Underwater tasks under Extreme Sea Conditions".
Plese feel free to contact @360ZMEM(Guanwen Xie) if you encounter issues on this project.
Get Started
Run this command to install the dependencies:
bashpip install -r requirements.txt
Run this command to train the TD3(DDPG) agents:
bashpython train_td3.py # TD3
System Model
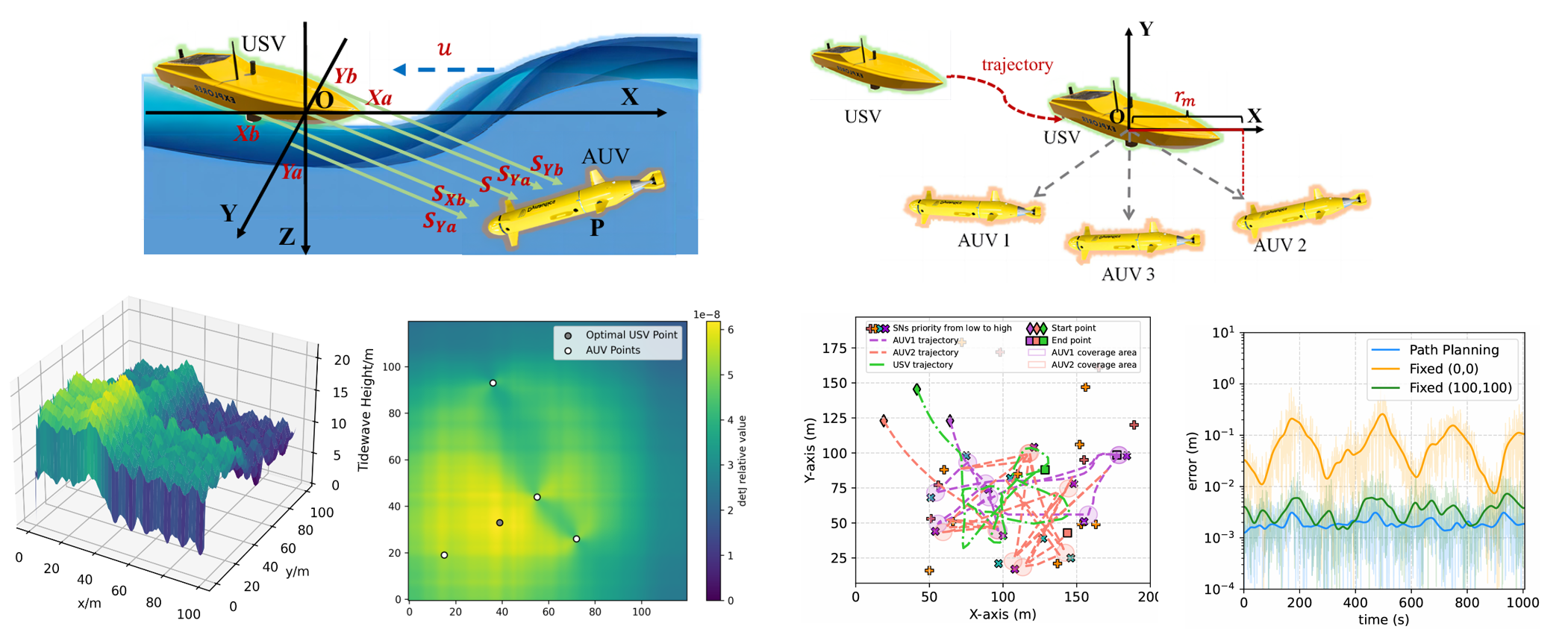
This Python file includes the relevant classes and functions for calculating tide waves and USBL positioning. You can run this command to test and visualize the tide wave and evaluate the positioning results produced using cross-shaped hydrophones when the USV is positioned at the origin of the coordinates.
bashpython tidewave_usbl.py
This Python file includes the environment simulation code and functions for USV-AUV collaboration. Execute this Python file to test the USV-AUV collaboration and visualize the Fisher determinant value and the optimal USV position.
bashpython colab.py
Evaluation & Figure
Subsequently, execute this command to perform the simulation using the trained policies, generating the USV/AUV trajectories and the AUV tracking error:
bashpython eval_td3.py
Finally, execute this command to generate the figures of the trajectories and tracking error, similar to Fig. 4(a) and Fig. 4(b) in the original paper.
bashpython fig_draw_example/draw_trajectory.py #draw trajectories of AUVs and USV, fig4a python fig_draw_example/draw_tracking_error.py #fig4b
Cite
If you find it useful for your work please cite:
bibtex@INPROCEEDINGS{10888444, author={Xu, Jingzehua and Xie, Guanwen and Wang, Xinqi and Ding, Yimian and Zhang, Shuai}, booktitle={ICASSP 2025 - 2025 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP)}, title={USV-AUV Collaboration Framework for Underwater Tasks under Extreme Sea Conditions}, year={2025}, volume={}, number={}, pages={1-5}, keywords={Training;Codes;Collaboration;Data collection;Signal processing;Robustness;Path planning;Speech processing;Optimization;Surface treatment;Autonomous underwater vehicle;Unmanned surface vehicle;Fisher information matrix;Reinforcement learning;Extreme sea conditions;Underwater tasks}, doi={10.1109/ICASSP49660.2025.10888444}}
Star History
Contributors
Showing top 1 contributor by commit count.

Related Repositories

RobustFieldAutonomyLab/Multi_Robot_Distributional_RL_Navigation
[ICRA 2024] Decentralized Multi-Robot Navigation for Autonomous Surface Vehicles with Distributional Reinforcement Learning

AeroRust/nmea
NMEA 0183 - for communication between marine electronics such as echo sounder, sonars, anemometer, gyrocompass, autopilot, GNSS receivers and many other types of instruments. Defined and controlled by the National Marine Electronics Association (NMEA)
RobustFieldAutonomyLab/Distributional_RL_Navigation
[IROS 2023] Robust Unmanned Surface Vehicle Navigation with Distributional Reinforcement Learning

aavek/Aeolus-Ocean
An all-weather, day-and-night, collision avoidance simulator that can be implemented as a digital twin for the autonomous COLREG-compliant navigation of maritime vessels.

bborja/modd
Dataset and Evaluation Scripts for Obstacle Detection via Semantic Segmentation in a Marine Environment