VST
Visual Spatial Tuning
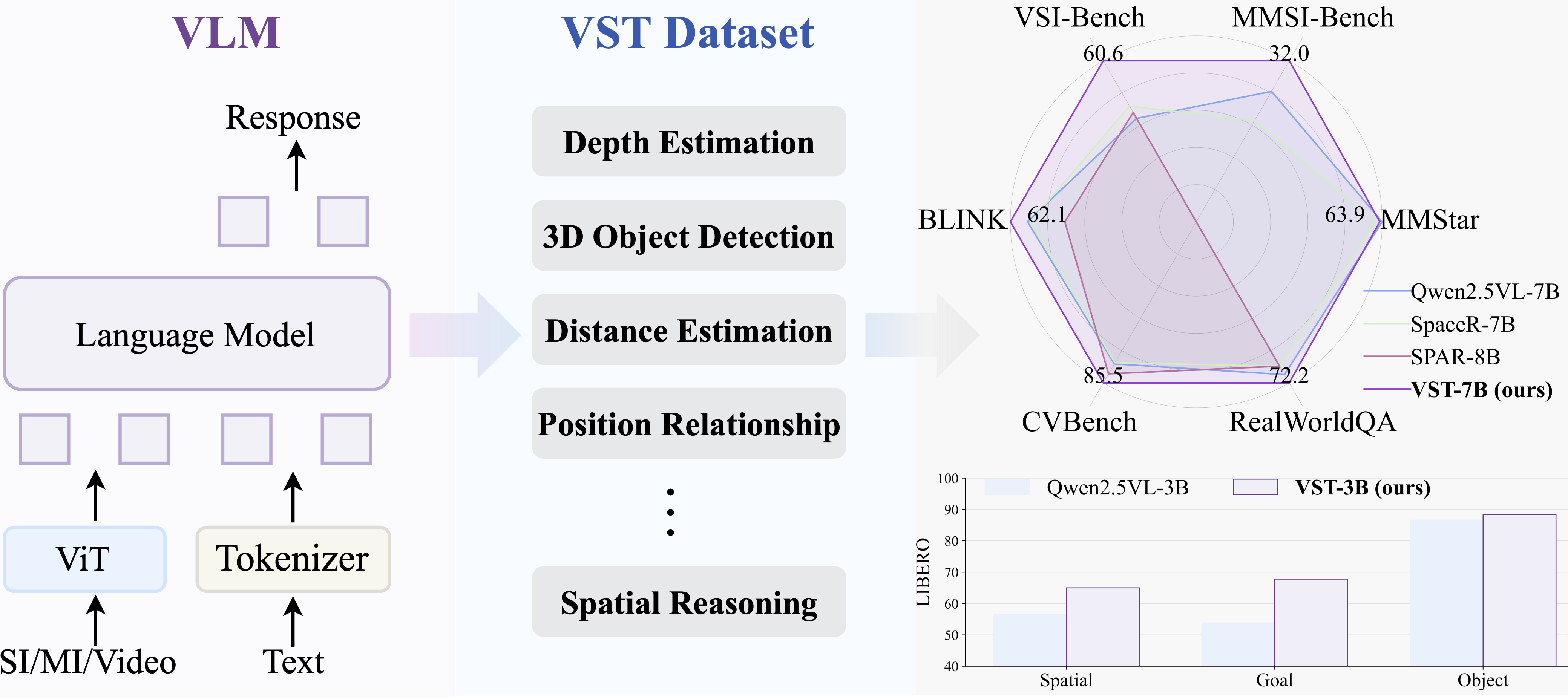
We introduce **Visual Spatial Tuning (VST)**, a comprehensive framework designed to cultivate Vision-Language Models (VLMs) with human-like visuospatial abilities—from spatial perception to advanced reasoning. The project is written primarily in Jupyter Notebook, distributed under the Apache License 2.0 license, first published in 2025. Key topics include: spatial-intelligence, spatial-reasoning, spatial-understanding, vlm.
We introduce Visual Spatial Tuning (VST), a comprehensive framework designed to cultivate Vision-Language Models (VLMs) with human-like visuospatial abilities—from spatial perception to advanced reasoning.
🔥 News
- Support Qwen3VL training code, see assets/train.md for more details.
- Training code has been updated and verified, please see Train, which is very efficient because of data packing.
💡 Key Highlights
- VST-P: 4.1M samples across 19 skills, spanning single images, multi-image scenarios, and videos—boosting spatial perception in VLMs.
- VST-R: 135K curated samples that teach models to reason in space, including step-by-step reasoning and rule-based data for reinforcement learning.
- Progressive Training Pipeline: Start with supervised fine-tuning to build foundational spatial perception, then reinforce spatial reasoning abilities via RL. VST achieves state-of-the-art results on spatial benchmarks (34.8% on MMSI-Bench, 61.2% on VSIBench) without compromising general capabilities.
- Vision-Language-Action Models Enhanced: The VST paradigm significantly strengthens robotic learning.
🏷️ Model Card
| Model Name | 🤗 HuggingFace |
|---|---|
| VST-3B-SFT | rayruiyang/VST-3B-SFT |
| VST-3B-RL | rayruiyang/VST-3B-RL |
| VST-7B-SFT | rayruiyang/VST-7B-SFT |
| VST-7B-RL | rayruiyang/VST-7B-RL |
<details> <summary>Click to see performance 📈 </summary> <h3>📈 Spatial & General Benchmarks</h3> <table> <tr> <th>Models</th><th>CV</th><th>3DSR</th><th>MMSI</th><th>BLINK</th><th>VSI</th><th>MMStar</th><th>MMB</th><th>RealworldQA</th><th>MMMU</th><th>OCRB</th><th>AI2D</th> </tr> <tr> <td>VST-3B-SFT</td><td>84.4</td><td>54.1</td><td>30.2</td><td>59.1</td><td>57.9</td><td>58.0</td><td>80.9</td><td>68.4</td><td>45.2</td><td>83.7</td><td>82.5</td> </tr> <tr> <td>VST-3B-RL</td><td>84.2</td><td>56.5</td><td>31.3</td><td>57.2</td><td>57.7</td><td>58.9</td><td>80.5</td><td>68.5</td><td>49.8</td><td>80.9</td><td>82.4</td> </tr> <tr> <td>VST-7B-SFT</td><td>85.5</td><td>54.6</td><td>32.0</td><td>62.1</td><td>60.6</td><td>63.1</td><td>83.3</td><td>72.2</td><td>50.6</td><td>85.5</td><td>84.9</td> </tr> <tr> <td>VST-7B-RL</td><td>86.5</td><td>60.1</td><td>34.8</td><td>62.6</td><td>61.2</td><td>63.5</td><td>83.0</td><td>68.5</td><td>49.4</td><td>86.1</td><td>83.5</td> </tr> </table> <h3>📈 VSIBench</h3> <table> <tr> <th>Methods</th><th>Avg.</th><th>Obj. Count</th><th>Abs. Dist.</th><th>Obj. Size</th><th>Room Size</th><th>Rel. Dist</th><th>Rel. Dir.</th><th>Route Plan</th><th>Appr. Order</th> </tr> <tr> <td>VST-3B-SFT</td><td>57.9</td><td>69.3</td><td>45.4</td><td>71.8</td><td>62.4</td><td>59.0</td><td>46.0</td><td>38.7</td><td>70.2</td> </tr> <tr> <td>VST-3B-RL</td><td>57.7</td><td>66.6</td><td>45.0</td><td>72.8</td><td>60.9</td><td>59.9</td><td>47.6</td><td>40.7</td><td>68.3</td> </tr> <tr> <td>VST-7B-SFT</td><td>60.6</td><td>72.0</td><td>44.4</td><td>74.3</td><td>68.3</td><td>59.7</td><td>55.8</td><td>44.9</td><td>65.2</td> </tr> <tr> <td>VST-7B-RL</td><td>61.2</td><td>71.6</td><td>43.8</td><td>75.5</td><td>69.2</td><td>60.0</td><td>55.6</td><td>44.3</td><td>69.2</td> </tr> </table> <h3>📈 SUN RGBD 3D Object Detection</h3> <table> <tr> <th>Methods</th><th>AP@15</th> </tr> <tr> <td>Seed1.5-VL</td><td>33.5</td> </tr> <tr> <td>Gemini-2.0-Pro</td><td>32.5</td> </tr> <tr> <td>Gemini Robotics-ER</td><td><b>48.3</b></td> </tr> <tr> <td>VST-3B-SFT</td><td>37.3</td> </tr> <tr> <td>VST-3B-RL</td><td>40.1</td> </tr> <tr> <td>VST-7B-SFT</td><td>41.6</td> </tr> <tr> <td>VST-7B-RL</td><td><b>44.2</b></td> </tr> </table> </details>shell# download models into checkpoints python tools/download_hf_model.py --model_list rayruiyang/VST-3B-SFT rayruiyang/VST-3B-RL rayruiyang/VST-7B-SFT rayruiyang/VST-7B-RL --local_dir checkpoints
⚡ Getting Started
Training & Evaluation
SFT: Please follow assets/train.md to prepare env, data and train models.
RL: Please follow projects/spatial_rl/README.md to prepare env, data and train models using RL.
VLA: Please follow assets/vla.md to train vla models.
Evaluation: Please follow benchmark/README.md to evaluate models.
Cookbook
| Cookbook | Description |
|---|---|
| scene understanding | Example for single image and multi-image inference |
| 3d object detection | Example for 3D object detection |
Using 🤗 Transformers to Chat
Install the inference dependency:
bashpip install transformers==4.57.0 pip install qwen-vl-utils
Then:
pythonimport torch from transformers import Qwen2_5_VLForConditionalGeneration, AutoTokenizer, AutoProcessor from qwen_vl_utils import process_vision_info THINK_SYSTEM_PROMPT = "You are a helpful assistant. You should first think about the reasoning process in the mind and then provide the user with the answer. The reasoning process is enclosed within <think> </think> tags, i.e. <think> reasoning process here </think> answer here." think_mesg = { "role": "system", "content": [{"type": "text", "text": THINK_SYSTEM_PROMPT}], } enable_thinking=False model_path="rayruiyang/VST-7B-RL" # We recommend enabling flash_attention_2 for better acceleration and memory saving, especially in multi-image and video scenarios. model = Qwen2_5_VLForConditionalGeneration.from_pretrained( model_path, torch_dtype=torch.bfloat16, attn_implementation="flash_attention_2", device_map="auto", ) # default processer processor = AutoProcessor.from_pretrained(model_path, min_pixels = 256*28*28, max_pixels=1280*28*28) messages = [ { "role": "user", "content": [ { "type": "image", "image": "http://images.cocodataset.org/train2017/000000075668.jpg", }, {"type": "text", "text": "Consider the real-world 3D locations of the objects. Is the 'no motorcycle' sign directly above the red bus?"}, ], } ] if enable_thinking: messages.insert(0, think_mesg) # Preparation for inference text = processor.apply_chat_template( messages, tokenize=False, add_generation_prompt=True ) image_inputs, video_inputs = process_vision_info(messages) inputs = processor( text=[text], images=image_inputs, videos=video_inputs, padding=True, return_tensors="pt", ) inputs = inputs.to("cuda") # Inference: Generation of the output generated_ids = model.generate(**inputs, max_new_tokens=1280) generated_ids_trimmed = [ out_ids[len(in_ids) :] for in_ids, out_ids in zip(inputs.input_ids, generated_ids) ] output_text = processor.batch_decode( generated_ids_trimmed, skip_special_tokens=True, clean_up_tokenization_spaces=False ) print(output_text[0])
📊 Dataset Overview
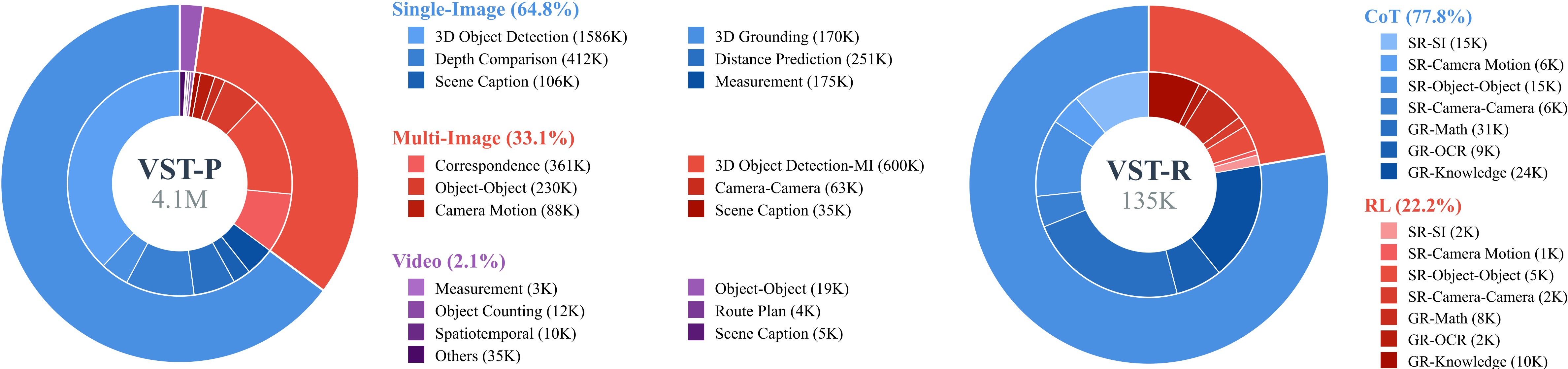
🖼️ VST-Perception (VST-P)
- 4.1M samples across 19 tasks for supervised fine-tuning.
- Covers three primary vision scenarios: single-image, multi-image, and video.
- VLMs tuned on VST-P show strong improvements in spatial perception:
- ~20% boost on CVBench-3D
- ~5% increase on BLINK
- ~16% gain on VSIBench
🧠 VST-Reasoning (VST-R)
- 135K samples, split into:
- Reasoning steps (CoT): Teach models how to reason spatially.
- Rule-checkable data: Used in online RL to further enhance reasoning skills.
- VLMs tuned on VST-R demonstrate:
- 8.9% improvement on MMSI-Bench
There are 500K reproduced data points [rayruiyang/vst_500k] for academic purposes. You can download them:
shellpython tools/download_hf_data.py --repo_id="rayruiyang/vst_500k" --local_dir $YOUR_LOCAL_PATH
[!NOTE]
- This data doesn't include the video files, please follow here to prepare video files.
- We use
<|image_pad|>and<|video_pad|>as the image and video special token.
[Optional] You can parse the parquet data into a json file and raw images by:
bashpython tools/parse_vst_500k.py --data_dir "$YOUR_LOCAL_PATH/vst_500k"
You will get the data:
textdata/ ├── images ├── vst_500k.json
📜 License
This project is licensed under the Apache License. See the LICENSE file for details.
The VST-3B model is fine-tuned from Qwen2.5VL-3B, its license is Qwen2.5VL-3B LICENSE.
Acknowledgement
Thanks for the projects: Qwen2.5VL, VeOmni, EasyR1, and VLMEvalKit.
If you find VST useful for your research or applications, please ⭐ star the repo or cite our work:
bibtex@article{vst, title={Visual Spatial Tuning}, author={Rui Yang, Ziyu Zhu, Yanwei Li, Jingjia Huang, Shen Yan, Siyuan Zhou, Zhe Liu, Xiangtai Li, Shuangye Li, Wenqian Wang, Yi Lin, Hengshuang Zhao}, journal={arXiv preprint arXiv:2511.05491}, year={2025} }
Contributors
Showing top 1 contributor by commit count.

Related Repositories

ruvnet/RuView
π RuView turns commodity WiFi signals into real-time spatial intelligence, vital sign monitoring, and presence detection — all without a single pixel of video.

manycore-research/SpatialLM
[NeurIPS 2025] SpatialLM: Training Large Language Models for Structured Indoor Modeling

worldbench/awesome-3d-4d-world-models
🌐 3D and 4D World Modeling: A Survey

InternRobotics/InternNav
InternRobotics' open platform for building generalized navigation foundation models.
InternRobotics/Aether
[ICCV 2025 & ICCV 2025 RIWM Outstanding Paper] Aether: Geometric-Aware Unified World Modeling

NJU-3DV/SpatialVID
[CVPR 2026] SpatialVID: A Large-Scale Video Dataset with Spatial Annotations