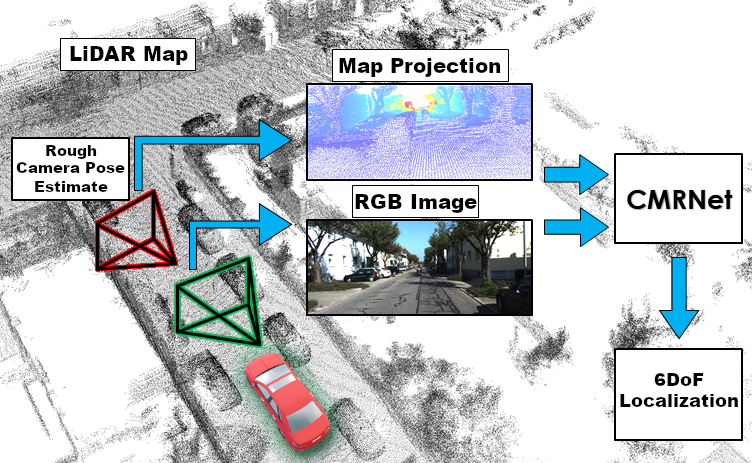
CMRNet
Code for "CMRNet: Camera to LiDAR-Map Registration" (ITSC 2019)
This work is licensed under a [Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License][cc-by-sa]. [![CC BY-SA 4.0][cc-by-sa-image]][cc-by-sa] The project is written primarily in Python, distributed under the Other license, first published in 2019. Key topics include: deep-learning, localization, monocular, point-cloud, pytorch.
CMRNet: Camera to LiDAR-Map Registration (IEEE ITSC 2019)
License
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.

News
Check out our new paper "CMRNet++: Map and Camera Agnostic Monocular Visual Localization in LiDAR Maps":
<img src="video-preview.png" width="512">
2022/05/19
- Updated for later version of PyTorch 1.4+, and CUDA 11.x
2020/06/24
- We released the pretrained weights, see Pretrained Model.
2020/05/11
- We released the SLAM ground truth files, see Local Maps Generation.
- Multi-GPU training.
- Added requirements.txt
Code
PyTorch implementation of CMRNet.
This code is a provided "as is", without warranty of any kind.
This version only works on GPUs (no CPU version available).
Tested on:
- Ubuntu 16.04/18.04
- python 3.6
- cuda 9/10/11.x
- pytorch 1.0.1/1.10
Dependencies (this list is not complete):
- sacred
- mathutils (use this version: https://gitlab.com/m1lhaus/blender-mathutils)
- openCV (for visualization)
- open3d 0.7 (only for maps preprocessing)
- pykitti (only for maps preprocessing)
Installation
Install CUDA, PyTorch, CuPy. Make sure to use the correct cuda version for all the packages.
:warning: For CUDA 11.x please uncomment line 17 in models/CMRNet/correlation_package/setup.py setup.py#L17
Install the prerequisite packages:
pip install -r requirements.txt
And finally, install the correlation_cuda and the visibility package:
cd models/CMRNet/correlation_package/
python setup.py install
cd ../../..
python setyp.py install
It is recommended to use a dedicated conda environment
Data
We trained and tested CMRNet on the KITTI odometry sequences 00, 03, 05, 06, 07, 08, and 09.
We used a LiDAR-based SLAM system to generate the ground truths.
The Data Loader requires a local point cloud for each camera frame, the point cloud must be expressed with respect to the camera_2 reference frame, BUT (very important) with a different axes representation: X-forward, Y-right, Z-down.
For reading speed and file size we decided to save the point clouds as h5 files.
The directory structure should looks like:
bashKITTI_ODOMETRY ├── 00 │ ├── image_2 │ │ ├── 000000.png │ │ ├── 000001.png │ │ ├── ... │ │ └── 004540.png │ ├── local_maps │ │ ├── 000000.h5 │ │ ├── 000001.h5 │ │ ├── ... │ │ └── 004540.h5 │ └── poses.csv └── 03 ├── image_2 │ ├── 000000.png │ ├── 000001.png │ ├── ... │ └── 000800.png ├── local_maps │ ├── 000000.h5 │ ├── 000001.h5 │ ├── ... │ └── 000800.h5 └── poses.csv
Local Maps Generation
To generate the h5 files, use the script preprocess/kitti_maps.py with the ground truth files in data/.
In the sequence 08, the SLAM failed to detect a loop closure, so the poses are not coherent around that closure.
Therefore, we splitted the map at frame 3000, so to have two coherent maps for that sequence.
bashpython preprocess/kitti_maps.py --sequence 00 --kitti_folder ./KITTI_ODOMETRY/ python preprocess/kitti_maps.py --sequence 03 --kitti_folder ./KITTI_ODOMETRY/ python preprocess/kitti_maps.py --sequence 05 --kitti_folder ./KITTI_ODOMETRY/ python preprocess/kitti_maps.py --sequence 06 --kitti_folder ./KITTI_ODOMETRY/ python preprocess/kitti_maps.py --sequence 07 --kitti_folder ./KITTI_ODOMETRY/ python preprocess/kitti_maps.py --sequence 08 --kitti_folder ./KITTI_ODOMETRY/ --end 3000 python preprocess/kitti_maps.py --sequence 08 --kitti_folder ./KITTI_ODOMETRY/ --start 3000 python preprocess/kitti_maps.py --sequence 09 --kitti_folder ./KITTI_ODOMETRY/
Single Iteration example
Training:
bashpython main_visibility_CALIB.py with batch_size=24 data_folder=./KITTI_ODOMETRY/ epochs=300 max_r=10 max_t=2 BASE_LEARNING_RATE=0.0001 savemodel=./checkpoints/ test_sequence=0
Evaluation:
bashpython evaluate_iterative_single_CALIB.py with test_sequence=00 maps_folder=local_maps data_folder=./KITTI_ODOMETRY/ weight="['./checkpoints/weights.tar']"
Iterative refinement example
Training
bashpython main_visibility_CALIB.py with batch_size=24 data_folder=./KITTI_ODOMETRY/sequences/ epochs=300 max_r=10 max_t=2 BASE_LEARNING_RATE=0.0001 savemodel=./checkpoints/ test_sequence=0 python main_visibility_CALIB.py with batch_size=24 data_folder=./KITTI_ODOMETRY/sequences/ epochs=300 max_r=2 max_t=1 BASE_LEARNING_RATE=0.0001 savemodel=./checkpoints/ test_sequence=0 python main_visibility_CALIB.py with batch_size=24 data_folder=./KITTI_ODOMETRY/sequences/ epochs=300 max_r=2 max_t=0.6 BASE_LEARNING_RATE=0.0001 savemodel=./checkpoints/ test_sequence=0
Evaluation
bashpython evaluate_iterative_single_CALIB.py with test_sequence=00 maps_folder=local_maps data_folder=./KITTI_ODOMETRY/sequences/ weight="['./checkpoints/iter1.tar','./checkpoints/iter2.tar','./checkpoints/iter3.tar']"
Pretrained Model
The weights for the three iterations, trained on the sequences 03, 05, 06, 07, 08 and 09 are available here:
Iteration 1
Iteration 2
Iteration 3
Results:
| <p>Median <br> Transl. error</p> | <p>Median <br> Rotation. error</p> | |
|---|---|---|
| Iteration 1 | 0.46 m | 1.60° |
| Iteration 2 | 0.25 m | 1.14° |
| Iteration 3 | 0.20 m | 0.97° |
Paper
"CMRNet: Camera to LiDAR-Map Registration"
If you use CMRNet, please cite:
@InProceedings{cattaneo2019cmrnet,
author={Cattaneo, Daniele and Vaghi, Matteo and Ballardini, Augusto Luis and Fontana, Simone and Sorrenti, Domenico Giorgio and Burgard, Wolfram},
booktitle={2019 IEEE Intelligent Transportation Systems Conference (ITSC)},
title={CMRNet: Camera to LiDAR-Map Registration},
year={2019},
pages={1283-1289},
doi={10.1109/ITSC.2019.8917470},
month={Oct}
}
If you use the ground truths, please also cite:
@INPROCEEDINGS{Caselitz_2016,
author={T. {Caselitz} and B. {Steder} and M. {Ruhnke} and W. {Burgard}},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={Monocular camera localization in 3D LiDAR maps},
year={2016},
pages={1926-1931},
doi={10.1109/IROS.2016.7759304}
}
Acknowledgments
correlation_package was taken from flownet2
PWCNet.py is a modified version of the original PWC-DC network
Contacts
Daniele Cattaneo (cattaneo@informatik.uni-freiburg.de or d.cattaneo10@campus.unimib.it)
Contributors
Showing top 1 contributor by commit count.
