Pytracking
Visual tracking library based on PyTorch.
A general python framework for visual object tracking and video object segmentation, based on **PyTorch**. The project is written primarily in Python, distributed under the GNU General Public License v3.0 license, first published in 2019. It has gained significant community traction with 3,504 stars and 613 forks on GitHub. Key topics include: computer-vision, machine-learning, tracking, visual-tracking.
PyTracking
A general python framework for visual object tracking and video object segmentation, based on PyTorch.
:fire: One tracking paper accepted at WACV 2024! 👇
- Beyond SOT: Tracking Multiple Generic Objects at Once | Code available!
:fire: One tracking paper accepted at WACV 2023! 👇
- Efficient Visual Tracking with Exemplar Transformers | Code available!
:fire: One tracking paper accepted at ECCV 2022! 👇
- Robust Visual Tracking by Segmentation | Code available!
Highlights
TaMOs, RTS, ToMP, KeepTrack, LWL, KYS, PrDiMP, DiMP and ATOM Trackers
Official implementation of the TaMOs (WACV 2024), RTS (ECCV 2022), ToMP (CVPR 2022), KeepTrack (ICCV 2021), LWL (ECCV 2020), KYS (ECCV 2020), PrDiMP (CVPR 2020),
DiMP (ICCV 2019), and ATOM (CVPR 2019) trackers, including complete training code and trained models.
Tracking Libraries
Libraries for implementing and evaluating visual trackers. It includes
- All common tracking and video object segmentation datasets.
- Scripts to analyse tracker performance and obtain standard performance scores.
- General building blocks, including deep networks, optimization, feature extraction and utilities for correlation filter tracking.
Training Framework: LTR
LTR (Learning Tracking Representations) is a general framework for training your visual tracking networks. It is equipped with
- All common training datasets for visual object tracking and segmentation.
- Functions for data sampling, processing etc.
- Network modules for visual tracking.
- And much more...
Model Zoo
The tracker models trained using PyTracking, along with their results on standard tracking
benchmarks are provided in the model zoo.
Trackers
The toolkit contains the implementation of the following trackers.
TaMOs (WACV 2024)
[Paper] [Raw results]
[Models] [Training Code] [Tracker Code]
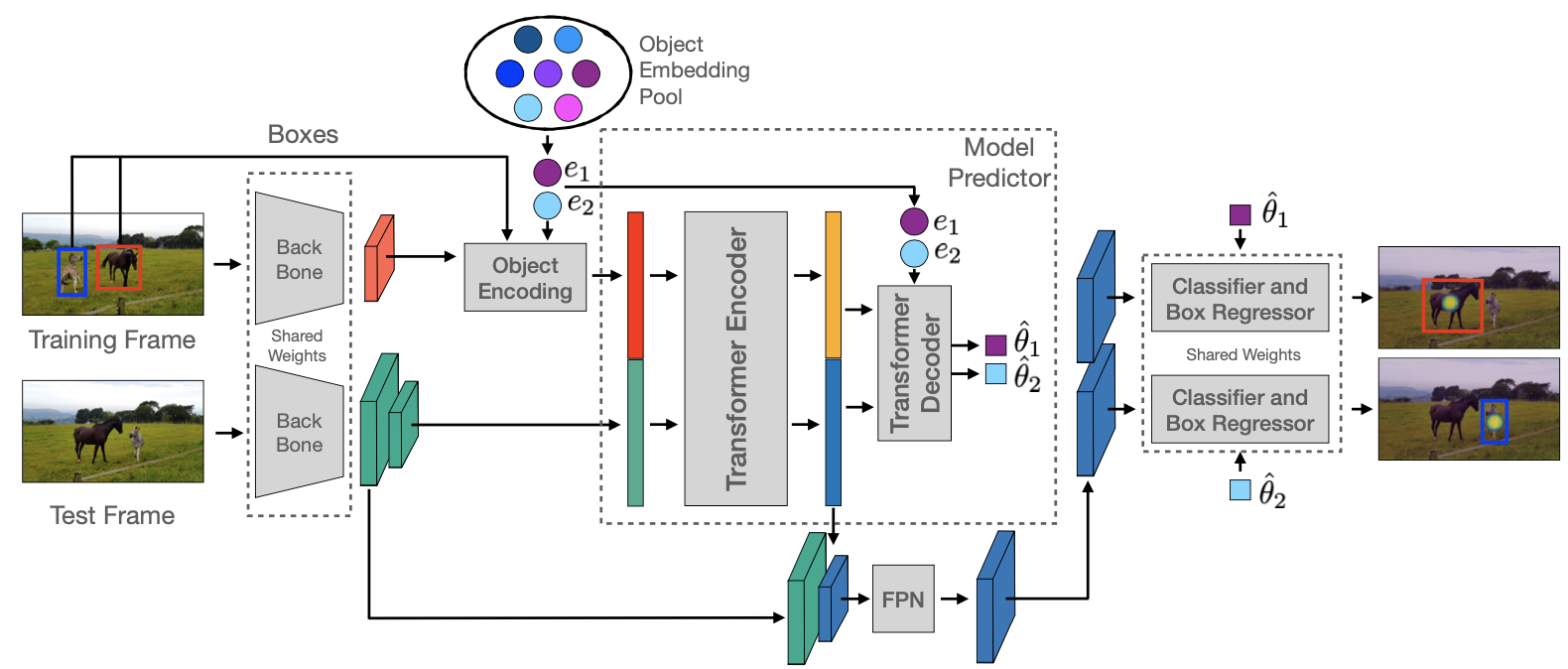
Official implementation of TaMOs. TaMOs is the first generico object tracker to tackle the problem of tracking multiple
generic object at once. It uses a shared model predictor consisting of a Transformer in order to produce multiple
target models (one for each specified target). It achieves sub-linear run-time when tracking multiple objects and
outperforms existing single object trackers when running one instance for each target separately.
TaMOs serves as the baseline tracker for the new large-scale generic object tracking benchmark LaGOT (see here)
that contains multiple annotated target objects per sequence.
RTS (ECCV 2022)
[Paper] [Raw results]
[Models] [Training Code] [Tracker Code]
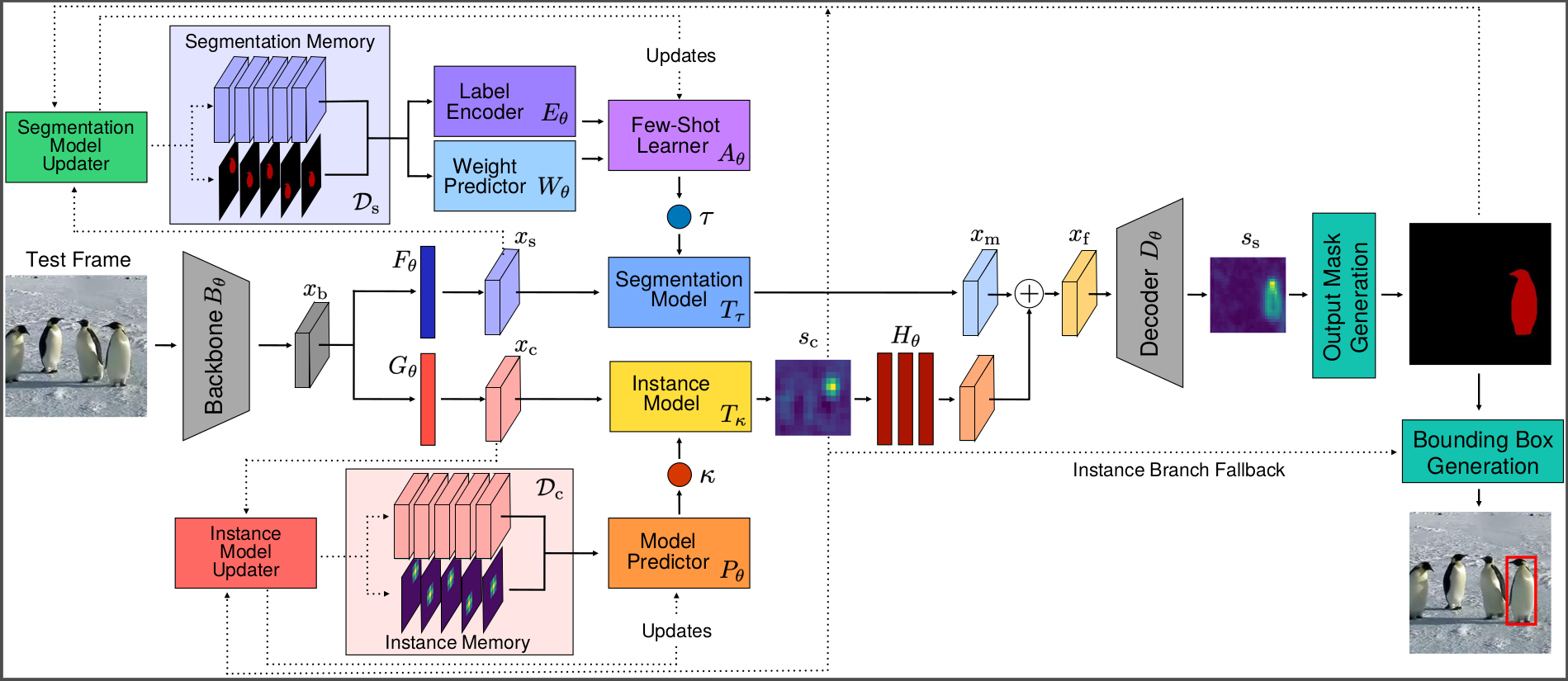
Official implementation of RTS. RTS is a robust, end-to-end trainable, segmentation-centric pipeline that internally
works with segmentation masks instead of bounding boxes. Thus, it can learn a better target representation that clearly
differentiates the target from the background. To achieve the necessary robustness for challenging tracking scenarios,
a separate instance localization component is used to condition the segmentation decoder when producing the output mask.
ToMP (CVPR 2022)
[Paper] [Raw results]
[Models] [Training Code] [Tracker Code]
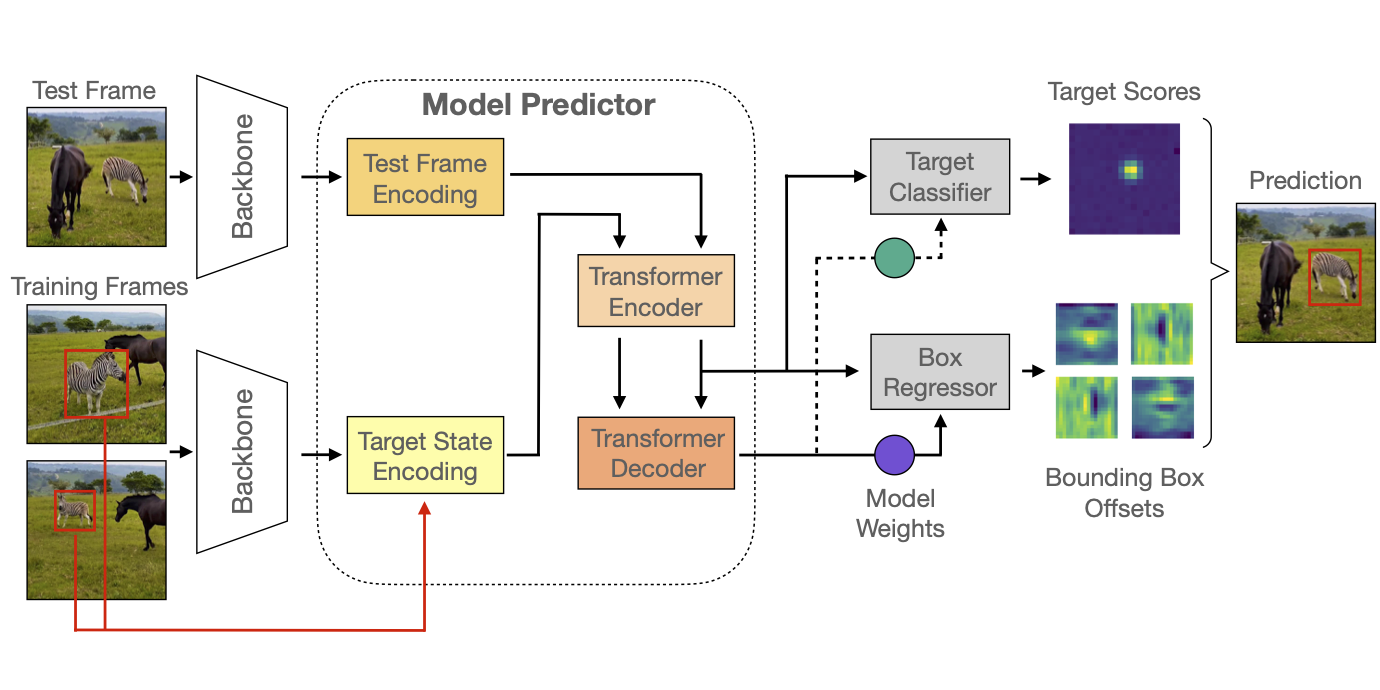
Official implementation of ToMP. ToMP employs a Transformer-based
model prediction module in order to localize the target. The model predictor is further extended to estimate a second set
of weights that are applied for accurate bounding box regression.
The resulting tracker ToMP relies on training and on test frame information in order to predict all weights transductively.
KeepTrack (ICCV 2021)
[Paper] [Raw results]
[Models] [Training Code] [Tracker Code]
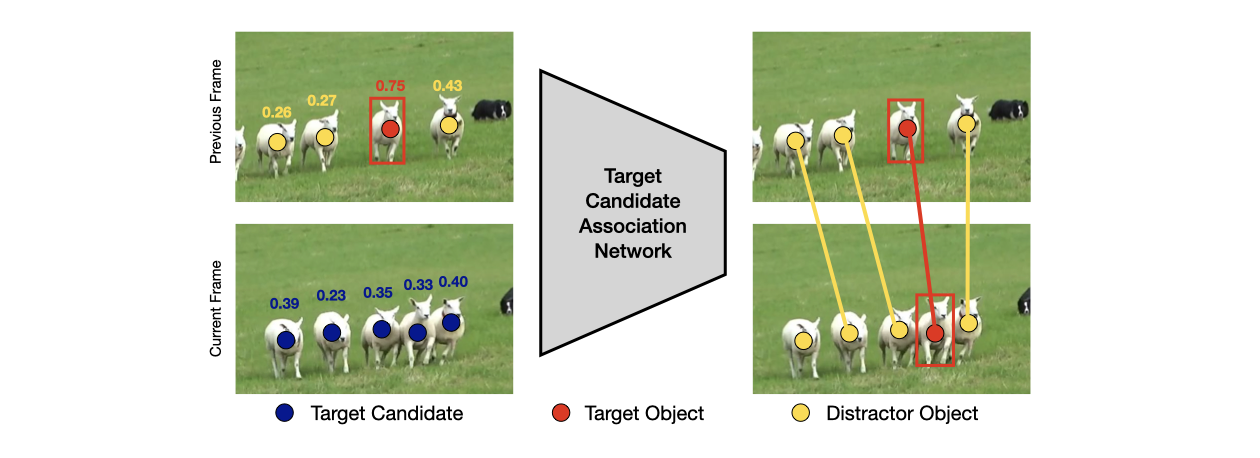
Official implementation of KeepTrack. KeepTrack actively handles distractor objects to
continue tracking the target. It employs a learned target candidate association network, that
allows to propagate the identities of all target candidates from frame-to-frame.
To tackle the problem of lacking groundtruth correspondences between distractor objects in visual tracking,
it uses a training strategy that combines partial annotations with self-supervision.
LWL (ECCV 2020)
[Paper] [Raw results]
[Models] [Training Code] [Tracker Code]
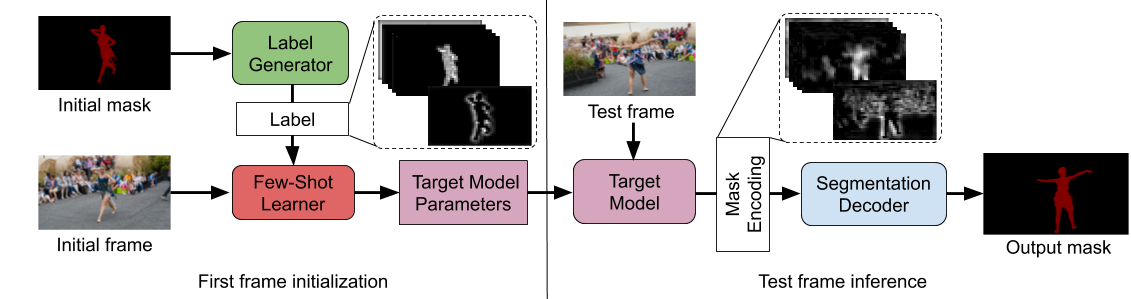
Official implementation of the LWL tracker. LWL is an end-to-end trainable video object segmentation architecture
which captures the current target object information in a compact parametric
model. It integrates a differentiable few-shot learner module, which predicts the
target model parameters using the first frame annotation. The learner is designed
to explicitly optimize an error between target model prediction and a ground
truth label. LWL further learns the ground-truth labels used by the
few-shot learner to train the target model. All modules in the architecture are trained end-to-end by maximizing segmentation accuracy on annotated VOS videos.
KYS (ECCV 2020)
[Paper] [Raw results]
[Models] [Training Code] [Tracker Code]
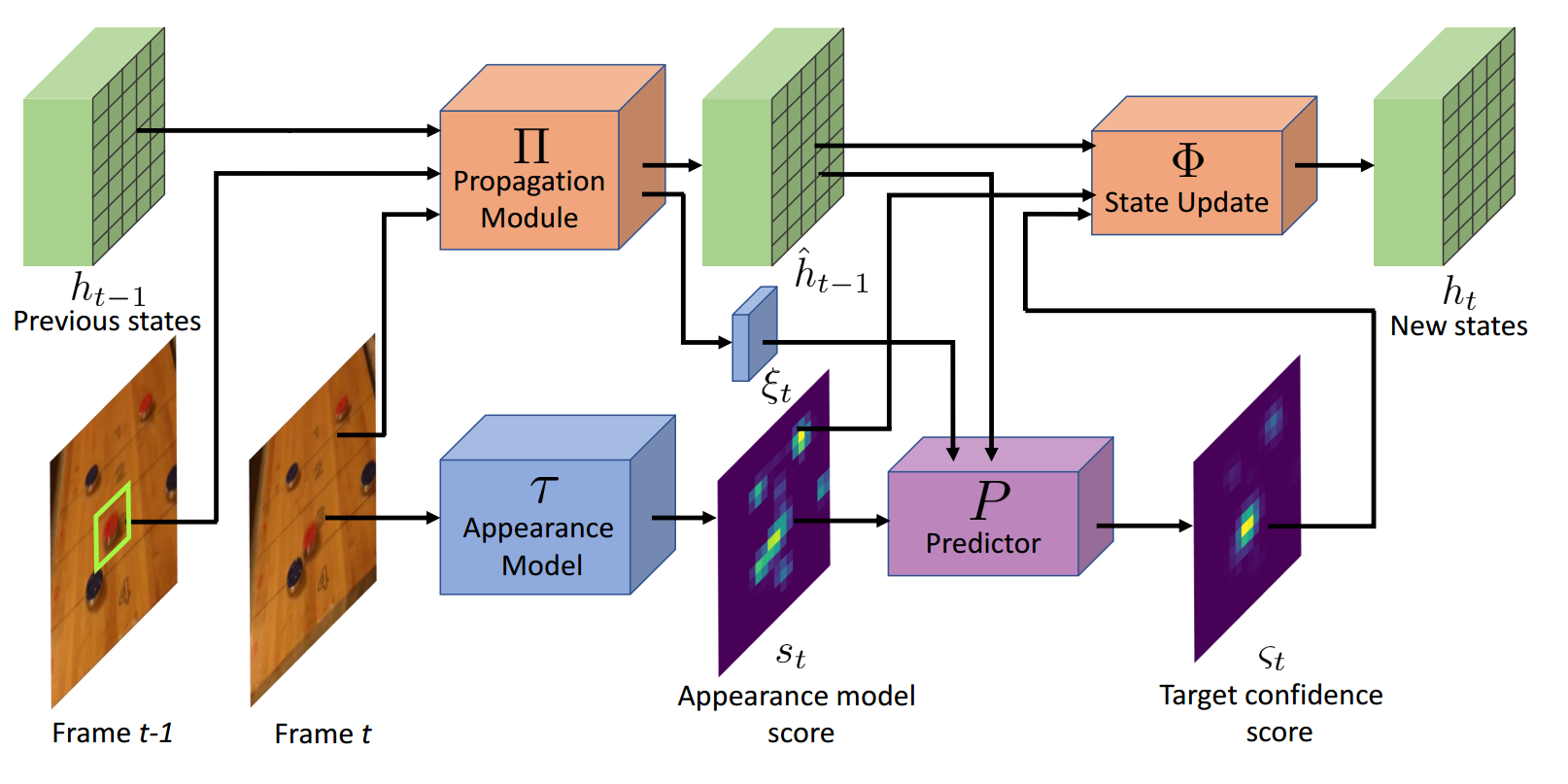
Official implementation of the KYS tracker. Unlike conventional frame-by-frame detection based tracking, KYS
propagates valuable scene information through the sequence. This information is used to
achieve an improved scene-aware target prediction in each frame. The scene information is represented using a dense
set of localized state vectors. These state vectors are propagated through the sequence and combined with the appearance
model output to localize the target. The network is learned to effectively utilize the scene information by directly maximizing tracking performance on video segments
PrDiMP (CVPR 2020)
[Paper] [Raw results]
[Models] [Training Code] [Tracker Code]
Official implementation of the PrDiMP tracker. This work proposes a general
formulation for probabilistic regression, which is then applied to visual tracking in the DiMP framework.
The network predicts the conditional probability density of the target state given an input image.
The probability density is flexibly parametrized by the neural network itself.
The regression network is trained by directly minimizing the Kullback-Leibler divergence.
DiMP (ICCV 2019)
[Paper] [Raw results]
[Models] [Training Code] [Tracker Code]
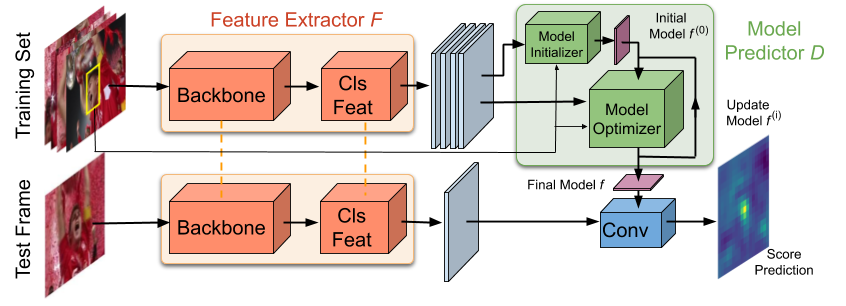
Official implementation of the DiMP tracker. DiMP is an end-to-end tracking architecture, capable
of fully exploiting both target and background appearance
information for target model prediction. It is based on a target model prediction network, which is derived from a discriminative
learning loss by applying an iterative optimization procedure. The model prediction network employs a steepest descent
based methodology that computes an optimal step length in each iteration to provide fast convergence. The model predictor also
includes an initializer network that efficiently provides an initial estimate of the model weights.
ATOM (CVPR 2019)
[Paper] [Raw results]
[Models] [Training Code] [Tracker Code]
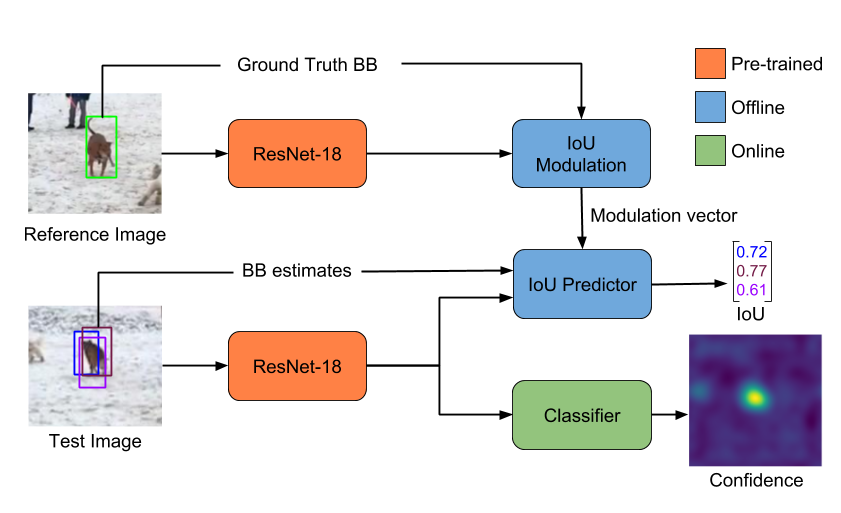
Official implementation of the ATOM tracker. ATOM is based on
(i) a target estimation module that is trained offline, and (ii) target classification module that is
trained online. The target estimation module is trained to predict the intersection-over-union (IoU) overlap
between the target and a bounding box estimate. The target classification module is learned online using dedicated
optimization techniques to discriminate between the target object and background.
ECO/UPDT (CVPR 2017/ECCV 2018)
[Paper] [Models] [Tracker Code]
An unofficial implementation of the ECO tracker. It is implemented based on an extensive and general library for complex operations and Fourier tools. The implementation differs from the version used in the original paper in a few important aspects.
- This implementation uses features from vgg-m layer 1 and resnet18 residual block 3.
- As in our later UPDT tracker, seperate filters are trained for shallow and deep features, and extensive data augmentation is employed in the first frame.
- The GMM memory module is not implemented, instead the raw projected samples are stored.
Please refer to the official implementation of ECO if you are looking to reproduce the results in the ECO paper or download the raw results.
Associated trackers
We list associated trackers that can be found in external repositories.
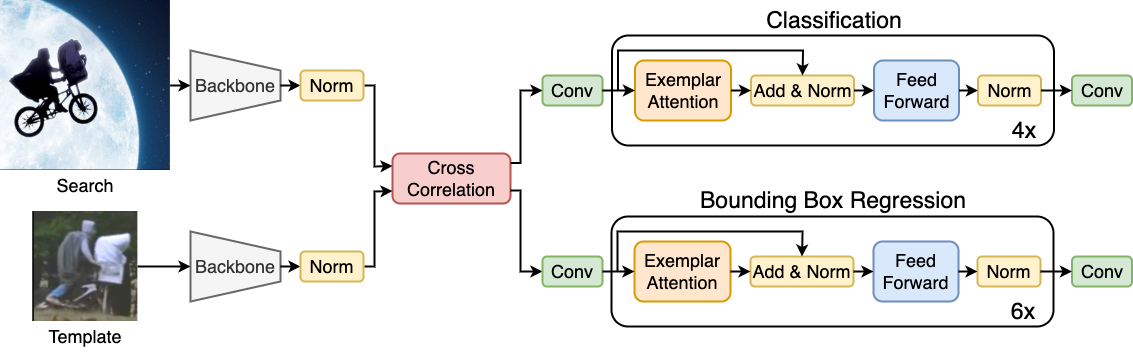
E.T.Track (WACV 2023)
Official implementation of E.T.Track. E.T.Track utilized our proposed Exemplar Transformer, a transformer module
utilizing a single instance level attention layer for realtime visual object tracking. E.T.Track is up to 8x faster than
other transformer-based models, and consistently outperforms competing lightweight trackers that can operate in realtime
on standard CPUs.
Installation
Clone the GIT repository.
bashgit clone https://github.com/visionml/pytracking.git
Clone the submodules.
In the repository directory, run the commands:
bashgit submodule update --init
Install dependencies
Run the installation script to install all the dependencies. You need to provide the conda install path (e.g. ~/anaconda3) and the name for the created conda environment (here pytracking).
bashbash install.sh conda_install_path pytracking
This script will also download the default networks and set-up the environment.
Note: The install script has been tested on an Ubuntu 18.04 system. In case of issues, check the detailed installation instructions.
Windows: (NOT Recommended!) Check these installation instructions.
Let's test it!
Activate the conda environment and run the script pytracking/run_webcam.py to run ATOM using the webcam input.
bashconda activate pytracking cd pytracking python run_webcam.py dimp dimp50
What's next?
pytracking - for implementing your tracker
ltr - for training your tracker
Contributors
Main Contributors
Guest Contributors
- Felix Järemo-Lawin [LWL]
Acknowledgments
- Thanks for the great PreciseRoIPooling module.
- We use the implementation of the Lovász-Softmax loss from https://github.com/bermanmaxim/LovaszSoftmax.
Contributors
Showing top 12 contributors by commit count.












Related Repositories

opencv/opencv
Open Source Computer Vision Library

Developer-Y/cs-video-courses
List of Computer Science courses with video lectures.

d2l-ai/d2l-zh
《动手学深度学习》:面向中文读者、能运行、可讨论。中英文版被70多个国家的500多所大学用于教学。

ultralytics/ultralytics
Ultralytics YOLO 🚀

microsoft/AI-For-Beginners
12 Weeks, 24 Lessons, AI for All!

roboflow/supervision
We write your reusable computer vision tools. 💜