RobotArmHelix
3D Simulation, forward and inverse kinematics of a robotic arm in C# using WPF and helix-toolkit
3D Simulation, forward and inverse kinematics of a robotic arm in C# using WPF and helix-toolkit The project is written primarily in C#, first published in 2017. Key topics include: c-sharp, inverse-kinematics, kinematics, robotic-arm, visual-c-sharp.
RobotArmHelix
3D Simulation, forward and inverse kinematics of a robotic arm in C# using WPF and helix-toolkit
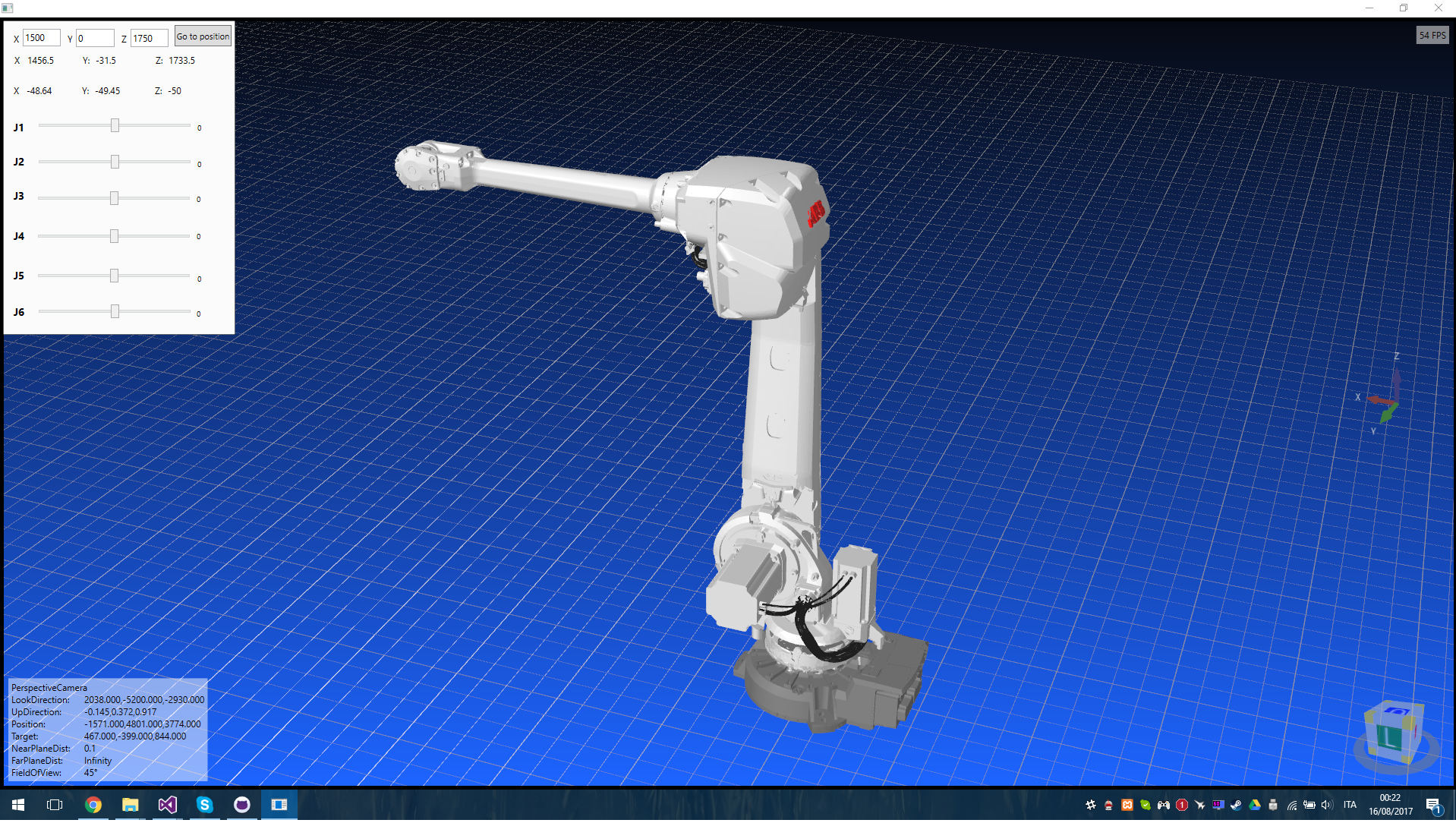
This is a simple project developed in C# by using helix-tookit. In order to compile this project the DLLs of Helix need to be compiled by downloading the source code from the helix repository and compiling them.
The aim of the project was to test forward and inverse kinematics which has been achieved thanks to helix and wpf. The Inverse kinematics has been developed on the base of http://www.alanzucconi.com/2017/04/10/robotic-arms/, it is in fact based on gradient descent.
The 3D models belong to the ABB's IRB 4600 Robotic Arm and can be found here: http://new.abb.com/products/robotics/industrial-robots/irb-4600/irb-4600-cad. Finally, the meshes have been converted from STEP to STL by using FreeCad and simplified for faster processing and better performances with MeshLab using the Qaudric Edge Collapse Decimation semplification filter giving 10.000 faces as input.
Based on the RAV2 project of karthikram827
Contributors
Showing top 1 contributor by commit count.

Related Repositories

shadowsocks/shadowsocks-windows
A C# port of shadowsocks

AvaloniaUI/Avalonia
Develop Desktop, Embedded, Mobile and WebAssembly apps with C# and XAML. The future of .NET UI

google/flatbuffers
FlatBuffers: Memory Efficient Serialization Library

icsharpcode/ILSpy
.NET Decompiler with support for PDB generation, ReadyToRun, Metadata (&more) - cross-platform!

CodeHubApp/CodeHub
CodeHub is an iOS application written using Xamarin

QuantConnect/Lean
Lean Algorithmic Trading Engine by QuantConnect (Python, C#)