LIO SAM 6AXIS
LIO_SAM for 6-axis IMU and GNSS.
LIO_SAM_6AXIS is an open-source SLAM project based on the project [LIO_SAM](https://github.com/TixiaoShan/LIO-SAM) that has been modified to support a wider range of sensors. It includes support for a 6-axis IMU and low-cost GNSS, making it easier to adapt for your own sensor setup. The project is written primarily in C++, first published in 2022. Key topics include: 6-axis-imu, gps, gtsam, lidar, lidar-inertial.
LIO_SAM_6AXIS
LIO_SAM_6AXIS is an open-source SLAM project based on the project LIO_SAM that has been modified to support a wider range of sensors. It includes support for a 6-axis IMU and low-cost GNSS, making it easier to adapt for your own sensor setup.
<img src="README/image-20220609035032131.png" alt="image-20220609035032131" style="zoom: 67%;" />Features
LIO_SAM_6AXIS includes the following features:
- Support for a 6-axis IMU: This allows you to use orientation information in state estimation, improving the accuracy of your results.
- Support for low-cost GNSS: By eliminating the need to adapt for the robot_localization node, this feature makes it easier to integrate GNSS into your SLAM system.
- GPS constraint visualization: This feature helps with debugging by allowing you to visualize the GPS constraints that are being used in the optimization.
Latest News(2025-05-23)
- Currently, it is challenging to make significant improvements and enhancements based on this framework. We strongly recommend using MS-Mapping for mapping with better accuracy and robustness; you only need to set
useMultiMode = false. Additionally, multi-session mapping is supported, and a Docker environment is available for configuration.
.png)
Getting Started
To get started with LIO_SAM_6AXIS, follow these steps:
- Clone the repository:
bashgit clone https://github.com/JokerJohn/LIO_SAM_6AXIS.git
- Install the dependencies:
bashcd LIO_SAM_6AXIS catkin build
- Launch the roslaunch file for your sensor setup:
bash# set your bag_path here roslaunch lio_sam_6axis test_vlp16.launch
For more information on how to use LIO_SAM_6AXIS, see the video tutorial and documentation.
- finally, save your point cloud map.
<img src="README/image-20220609044824460.png" alt="image-20220609044824460" style="zoom: 80%;" />bash# map is in the LIO-SAM-6AXIS/data rosservice call /lio_sam_6axis/save_map
- for docker support.
Dockerfile is for people who don't want to break their own environment.
bash# please cd the folder which have Dockerfile first, approximately 10mins based on your internet and CPU docker build -t zhangkin/lio_sam_6axis . docker run -it --net=host --gpus all --name lio_sam_6axis zhangkin/lio_sam_6axis /bin/zsh # OR -v to link the folder from your computer into container (your_computer_loc:container_loc) docker run -it --net=host --gpus all --name lio_sam_6axis -v /home/kin/bag_data:/home/xchu/data/ramlab_dataset zhangkin/lio_sam_6axis /bin/zsh # in the container catkin build source devel/setup.zsh # with dataset download and linked ==> please see more usage in previous section roslaunch lio_sam_6axis ouster128_indoors.launch # 对于在内地的同学,可以换源`dockerhub`后,直接拉取: docker pull zhangkin/lio_sam_6axis
Documentation
The documentation for LIO_SAM_6AXIS can be found in the doc directory of the repository. It includes instructions on how to adapt the code for your own sensors and lidars.
Dataset and Adaptation
LIO_SAM_6AXIS is compatible with a range of datasets and sensor setups. To help you get started, we have included a table that lists some of the datasets and sensors that have been tested with LIO_SAM_6AXIS.
| Dataset | Description | Sensors | Download Links | Ground Truth | Comments |
|---|---|---|---|---|---|
| hkust_20201105full |  | VLP-16, STIM300 IMU, left camera, normal GPS | Dropbox, BaiduNetdisk (password: m8g4) | GT (password:123) | About 10 km outdoor, see this doc |
| HILTI DATASET 2022 |  | Hesai32 lidar, low-cost IMU, 5 Fisher Eye cameras | Download | The config/params_pandar.yaml is prepared for the HILTI sensors kit | |
| FusionPortable DATASET |  | Ouster OS1-128, STIM300 IMU, stereo camera | Download | GT | Indoors. When you download this compressed data, remember to execute the following command: rosbag decompress 20220216_garden_day_ref_compressed.bag |
| Multimodal Dataset |  | MS1600 | Download | Multimodal Dataset from Harsh Sub-Terranean Environment with Aerosol Particles for Frontier Exploration | |
| MS | 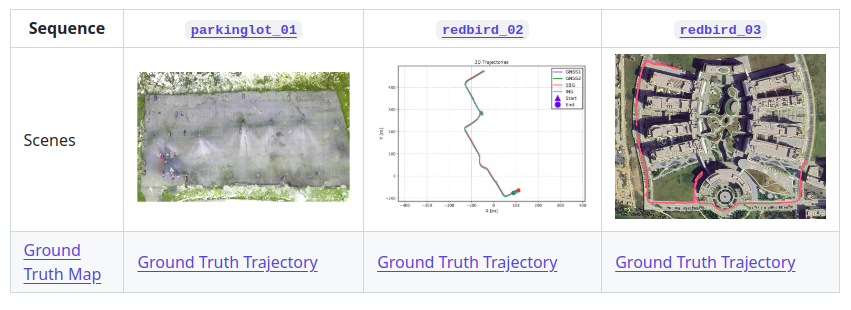 | Pandar-XT 32 | Download | GT | With accurate RTK trajectory and ground truth map |
| Newer college | 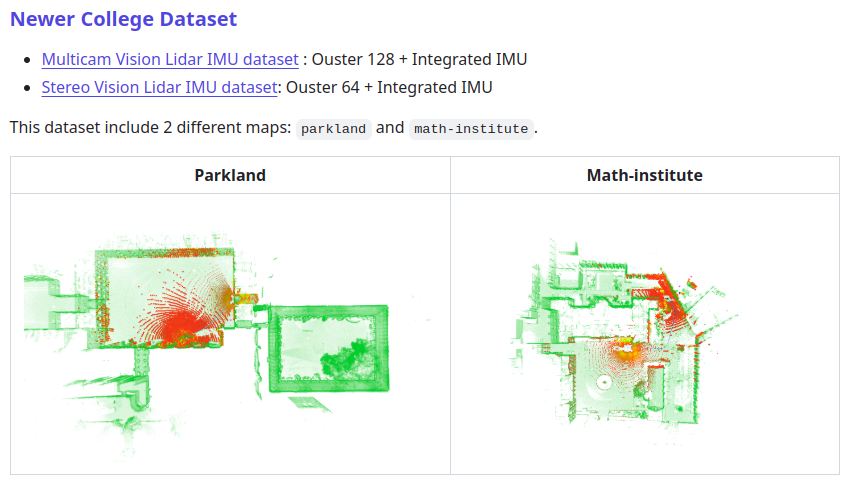 | Ouster128-OS1 + Integrated IMU | Download | GT | Campus scene with ground truth map. |
Related Package
1. LIO-SAM-6AXIS-UrbanNav
- LIO_SAM 6轴IMU适配香港城市数据集UrbanNav,并给出添加GPS约束和不加GPS约束的结果
2. LIO-SAM-6AXIS-INTENSITY
- integrate LIO-SAM and Imaging_lidar_place_recognition to achieve better mapping and localization result for SLAM system.
Credits
We would like to thank TixiaoShan for creating the LIO_SAM project that served as the foundation for this work.
Acknowledgments
Our deep gratitude goes to pedrotomas27, Guoqing Zhang, Jianhao Jiao, Jin Wu, and Qingwen Zhang for their invaluable contributions to this project. A special mention goes to the LIO_SAM for laying the groundwork for our efforts. We also thank the open-source community, whose relentless pursuit of SLAM technology advancement has made this project possible.
Contributors
Showing top 6 contributors by commit count.





