RoboticsLanguage
The Robotics Language is an open compiler where users can develop languages to generate ROS code
- We will ge giving a [tutorial at IROS 2019 in Macau](https://abstractionlanguages.github.io/IROS2019/). The project is written primarily in Python, distributed under the Apache License 2.0 license, first published in 2017. Key topics include: compiler, robotics-language, ros, ros-industrial, ros-node.
![]()


![]()
News
-
We will ge giving a tutorial at IROS 2019 in Macau.
-
We presented a tutorial at IEEE IRC 2019. Slides are available here.
-
We presented at the Amazon reMARS conference 2019
-
We presented at the AWS re:invent conference 2018
What is the language of Robotics?
This is a very deep question with difficult answers. If robotics is meant to equal or even surpass human capabilities, then the language of robotics should be able to describe human behaviour, all the way from muscle activation to intelligence. Achieving this on a single programming language seems like an impossible task. This project proposes a new framework where multiple domain specific languages are used together to describe the behaviour of a robot. Specifically, the Robotics Language (RoL) is a high level robotics programming language that generates ROS c++ nodes, HTML interfaces, or other elements.
Domain Specific Languages are computer languages specialised to a particular application domain. Such languages use the minimum information required to describe a particular concept for a domain, thus present an abstraction of information. This project uses the concept of abstraction languages to simplify programming by combining multiple domain specific languages in a single file.
The base RoL language has a structure similar to standard high-level programming languages
coffeescript# A simple topic echo node node( name:'example echo', definitions: block( # the input signal echo_in ∈ Signals(Strings, rosTopic:'/echo/in', onNew: echo_out = echo_in ), # the echo signal echo_out ∈ Signals(Strings, rosTopic:'/echo/out') ) )
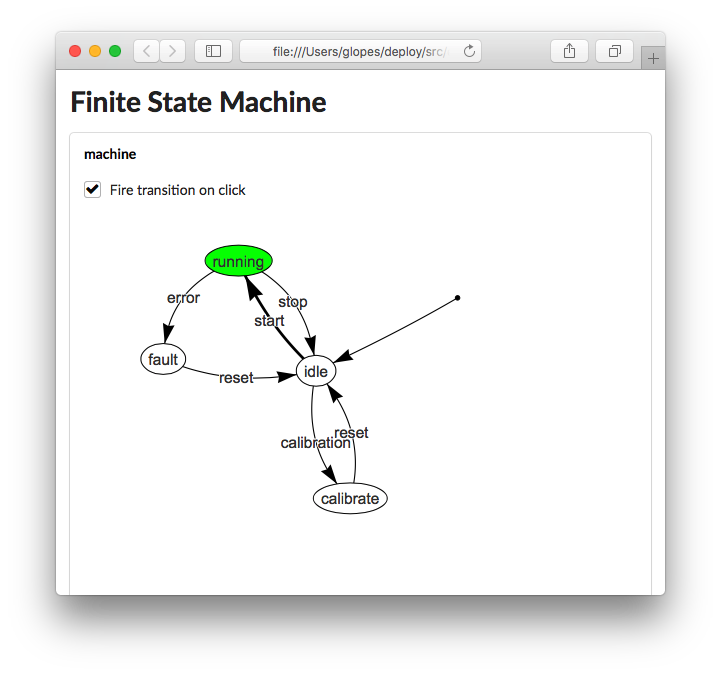
The power of the RoL is in its ability to integrate mini-abstraction languages:
coffeescript# A finite state machine node( name:'example state machine', definitions: block( # a mini-language: code is defined within `<{ }>` FiniteStateMachine<{ name:machine initial:idle (idle)-start->(running)-stop->(idle) (running)-error->(fault)-reset->(idle) (idle)-calibration->(calibrate)-reset->(idle) }>, # the start signal start ∈ Signals(Empty, rosTopic:'/start', onNew: machine.fire('start')), # the stop signal stop ∈ Signals(Empty, rosTopic:'/stop', onNew: machine.fire('stop')) ) )
Automatically generated graphical user interfaces in the browser allow for development and monitoring.
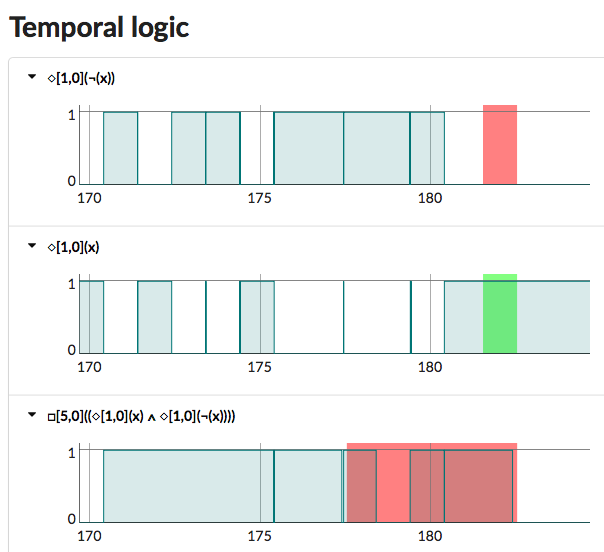
RoL contains high-level language element abstractions that are very useful for robotics, such as Interval Temporal Logic for signals.
coffeescriptnode( name:'temporal logic test example', definitions: block( # a signal x ∈ Signals(Booleans, rosTopic:'/temporal_logic/x'), when(□[1,0](x), print('always in the last second')), when(◇[4,1](x), print('eventually from 4 seconds to 1 second ago')), when(□[5,0](◇[1,0](x) ∧ ◇[1,0](¬x)), print('oscillating faster then 1Hz for at least 5 seconds')) ) )
Generated GUIs visualise the signals in time and the outcome of the logic.
The RoL is in practice an open compiler where users can develop their own languages by means of plug-ins. The RoL is programmed in python and uses XML as the internal abstract syntax tree.
Documentation
-
The Robotics Language
-
The Robotics Language compiler
-
Tutorials
Install using pip
The best way to install is using pip:
shellpip install RoboticsLanguage
Install using github
To install this version in github, first git clone:
shellgit clone https://github.com/robotcaresystems/RoboticsLanguage.git
Next, if you are a user run:
shellpip install .
If you are a developer run:
shellpip install -e .
Docker image scripts
To use the predefined docker scripts first install using pip:
shellpip install RoboticsLanguage
Next, if you are a ROS1 user run in the shell:
shellrol_docker
If you are a developer of the Robotics Language run in the shell:
shellrol_docker_development
For ROS2 use:
shellrol2_docker
or:
shellrol2_docker_development
Docker image "by hand"
Get the docker image:
shelldocker pull roboticslanguage/rol
Create a folder to share files between docker and your system:
shellmkdir -p ~/RoL/docker_catkin_ws
Add easy launch commands by copying the lines below into your ~/.bashrc:
shell# where is your base RoL folder export ROL_PATH=$HOME/RoL/ # alias to run robotics language docker alias rol_docker='xhost +local:docker; \ docker run -it --rm \ --name="rol_docker" \ --env=DISPLAY \ --env=XDG_RUNTIME_DIR \ --env=QT_X11_NO_MITSHM=1 \ --device=/dev/dri:/dev/dri \ -v /tmp/.X11-unix:/tmp/.X11-unix:rw \ -v /etc/localtime:/etc/localtime:ro \ -v "${ROL_PATH:?}/docker_catkin_ws:/home/roboticslanguage/catkin_ws/" \ --workdir /home/roboticslanguage/examples \ --net=host \ --add-host rol_docker:127.0.0.1 \ --hostname=rol_docker \ roboticslanguage/rol' # alias to attach to an existing rol_docker alias rol_docker_attach='docker exec -it -e "COLUMNS=$COLUMNS" -e "LINES=$LINES" rol_docker bash'
Next start the docker image
shellsource ~/.bashrc rol_docker
You can open another shell by running rol_docker_attach.
For the first time, setup the user rights in the shared folder:
shellsudo chown $(whoami):$(whoami) ~/catkin_ws
Once in the docker, everything is configured. You can compile the example:
shellrol 1_hello_world.rol -c
Make sure to source for the first time:
shellsource ~/catkin_ws/devel/setup.bash
Now you are ready to launch:
shellrol 1_hello_world.rol -l
Examples without docker
The following command will copy a collenction of examples into the current folder:
shellrol --copy-examples-here
Next try the examples:
shellrol 1_hello_world.rol -c
Make sure to source for the first time:
shellsource ~/catkin_ws/devel/setup.bash
Now you are ready to launch:
shellrol 1_hello_world.rol -l
Note: if you are not using the docker images and you don't have a catkin workspace make sure to run:
shellmkdir -p ~/catkin_ws/src cd ~/catkin_ws catkin init
After compiling the rol package for the first time make sure to source it:
shellsource ~/catkin_ws/devel/setup.bash
Work in progress
The Robotics Language is continuously evolving. Not all features are implemented. If find errors or you wish a new feature please let us know.
Acknowledgements
The Robotics Language is developed by Robot Care Systems B.V. (http://www.robotcaresystems.com)
<!-- ROSIN acknowledgement from the ROSIN press kit @ https://github.com/rosin-project/press_kit --> <a href="http://rosin-project.eu"> <img src="http://rosin-project.eu/wp-content/uploads/rosin_ack_logo_wide.png" alt="rosin_logo" height="60" > </a>
Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components.
More information: <a href="http://rosin-project.eu">rosin-project.eu</a>
<img src="http://rosin-project.eu/wp-content/uploads/rosin_eu_flag.jpg" alt="eu_flag" height="45" align="left" >
This project has received funding from the European Union’s Horizon 2020
research and innovation programme under grant agreement no. 732287.
Contributors
Showing top 5 contributors by commit count.





Related Repositories

vercel/next.js
The React Framework

rust-lang/rust
Empowering everyone to build reliable and efficient software.

sveltejs/svelte
web development for the rest of us

webpack/webpack
A bundler for javascript and friends. Packs many modules into a few bundled assets. Code Splitting allows for loading parts of the application on demand. Through "loaders", modules can be CommonJs, AMD, ES6 modules, CSS, Images, JSON, Coffeescript, LESS, ... and your custom stuff.

FuelLabs/sway
🌴 Empowering everyone to build reliable and efficient smart contracts.

gatsbyjs/gatsby
React-based framework with performance, scalability, and security built in.