Esp fc
Flight controller software for hobbyist - build your own flight controller.
The mini, DIY, Low cost, ESP32 based, high performance flight controller for hobbyists. The project is written primarily in C++, distributed under the MIT License license, first published in 2016. Key topics include: drone, dshot, dynamic-notch, elrs, esp-now.
ESP-FC Flight Controller
The mini, DIY, Low cost, ESP32 based, high performance flight controller for hobbyists.
Features
- Espressif targets (ESP32, ESP32-S3)
- ESC protocols (PWM, Oneshot125/42, Multishot, Brushed, Dshot150/300/600 bidirectional)
- PPM, SBUS, IBUS and CRSF Receivers
- Builtin ESP-NOW receiver and WiFi configuration read more...
- SPI and I2C gyro modules support (MPU6050, MPU9250, ICM20602, BMI160)
- Flight modes (ACRO, ANGLE, AIRMODE)
- Frames (Quad X)
- Betaflight configuration tool compatible (v10.10)
- Configurable Gyro Filters (LPF, Dynamic Notches, dTerm, RPM)
- Blackbox recording (OpenLog/OpenLager/Flash)
- Up to 4kHz gyro/loop on ESP32 with SPI gyro
- MSP and CLI protocol interface
- Resorce/Pin mapping
- In flight PID Tuning
- Buzzer, Led and voltage monitor
- Failsafe mode
Documentation
In this repository you can find firmware code that allows you to build your own flight controller. For convenience it mimics Betaflight 4.2 compability, so that it can be configured using betaflight-configurator. Also online blackbox-log-viewer can be used to analyze blackbox logs. In most aspects it is similar to Betaflight, so that many configuration and tuning advices are helpfull here too. But you must be aware, that this software is not the same as Betaflight, there are some limitations and differences in functionality and performance.
[!IMPORTANT]
Before you begin, read the following documentation carefully first!.
Join our Discord Channel to get help
Quick Start
Requirements
Hardware:
- ESP32 or ESP32-S3 board
- MPU9250 SPI or MPU6050 I2C gyro (GY-88, GY-91, GY-521 or similar)
- PDB with 5V BEC
- Buzzer and some electronic components (optional).
Software:
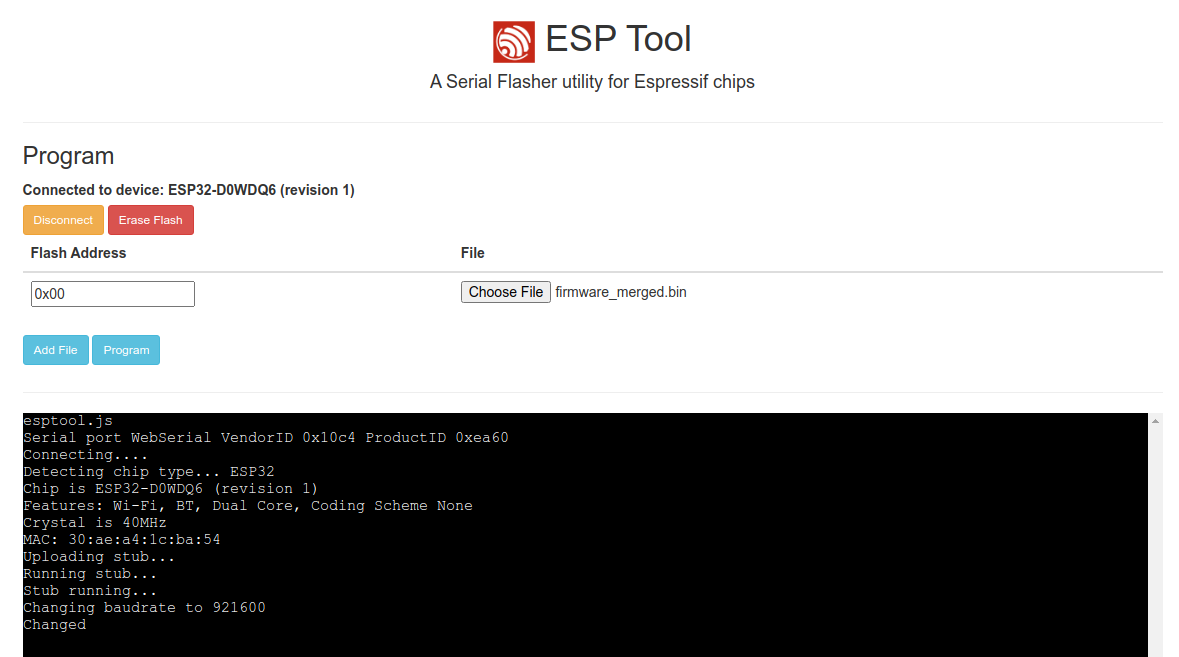
Flashing
- Download and unpack selected firmware from Releases Page
- Visit ESP Tool Website
- Click "Connect" and choose device port in dialog
- Add firmware file and set Flash Address to
0x00 - Click "Program"
- After success power cycle board
Setup
After flashing you need to configure few things first:
- Configure pinout according to your wiring, especially pin functions, you can find more information in CLI Reference
- Connect to Betaflight Configurator and setup to your preferences,
- Test motors without propellers
- Have fun ;)
[!NOTE]
Not all functions displayed in configurator are avalable in firmware. The rule of thumb is if you cannot change specific option in Betaflight Configurator, that means it is not supported. It usually rolls back to previous value after save. It is strongly recommended to follow setup guide.
Wiring diagrams
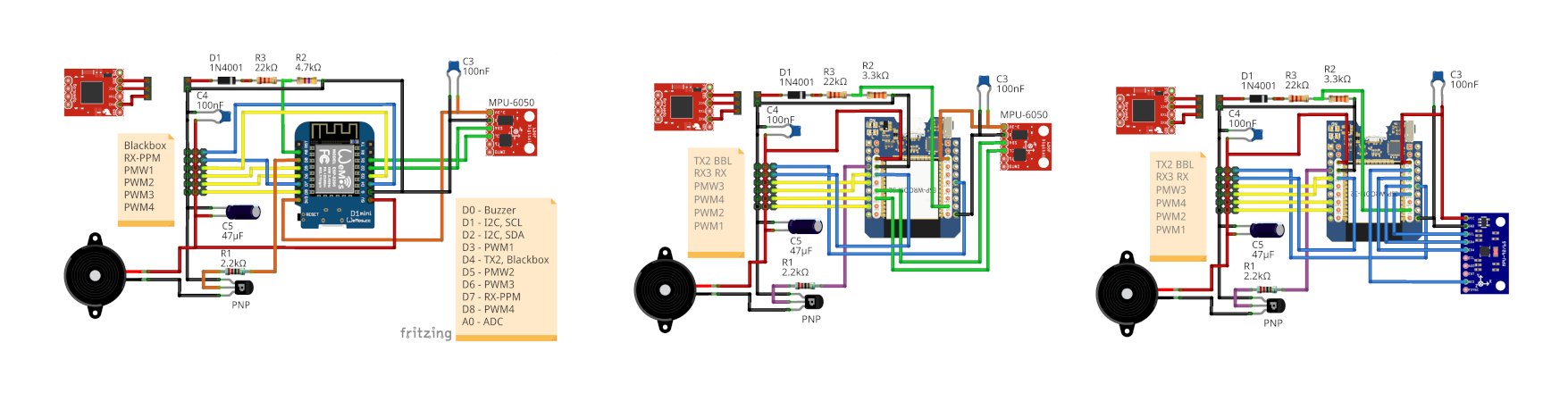
Supported Modules
- ESP32 - recommended
- ESP32-S3 - recommended
- ESP32-S2 - experimantal
- ESP32-C3 - experimantal, lack of performance, no FPU
- RP2350 - experimantal, partially works
- RP2040 - experimantal, lack of performance, no FPU
- ESP8266 - obsolete, no longer developed
Supported Sensors and Protocols
- Gyro: MPU6050, MPU6000, MPU6500, MPU9250, ICM20602, BMI160
- Barometers: BMP180, BMP280, SPL06
- Magnetometers: HMC5883, QMC5883, AK8963, QMC5883P
- Receivers: PPM, SBUS, IBUS, CRSF/ELRS
- Esc Protocols: PWM, BRUSHED, ONESHOT125, ONESHOT42, MULTISHOT, DSHOT150, DSHOT300, DSHOT600
- GPS: M8, M9, F9 & M10(dual band, all constellations configurable by cli)
- Other protocols: MSP, CLI, BLACKBOX, ESPNOW
Issues
You can report issues using Github tracker.
You can also join our Discord Channel
Development
- Visual Studio Code
- PlatformIO extension
- Git
Todo
- Altitude Hold
- GPS Navigation
- MS5611 barometer
- Balancing robot controller
Licence
This project is distributed under MIT Licence. Bear in mind that:
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
SOFTWARE.
Donations
If you like this project and you want it to be still developed, you can support me a little.
- BTC: 1Lopez7yPtbyjfLGe892JfheDFJMMt43tW
- LTC: LV3G3sJxz9AYpDMYUp8e1LCmerFYxVY3ak
Contributors
Showing top 10 contributors by commit count.










Related Repositories

ArduPilot/ardupilot
ArduPlane, ArduCopter, ArduRover, ArduSub source

PX4/PX4-Autopilot
PX4 Autopilot Software

hybridgroup/gobot
Golang framework for robotics, drones, and the Internet of Things (IoT)

openMVG/openMVG
open Multiple View Geometry library. Basis for 3D computer vision and Structure from Motion.

OpenDroneMap/ODM
A command line toolkit to generate maps, point clouds, 3D models and DEMs from drone, balloon or kite images. 📷

ExpressLRS/ExpressLRS
High Performance Open Source Radio Control Link