Seqwm
Offical implementation of ICLR'26 paper "Empowering Multi-Robot Cooperation via Sequential World Models"
The official implementation of the paper [Empowering Multi-Robot Cooperation via Sequential World Models](https://openreview.net/forum?id=IvUM6UwYCJ), which published on [ICLR 2026](https://iclr.cc/Conferences/2026). The project is written primarily in Python, first published in 2025. Key topics include: multi-robot, reinforcement-learning, world-model.
SeqWM: Sequential World Model for Multi-Robot Cooperation (ICLR'26)
The official implementation of the paper Empowering Multi-Robot Cooperation via Sequential World Models, which published on ICLR 2026.
Overview
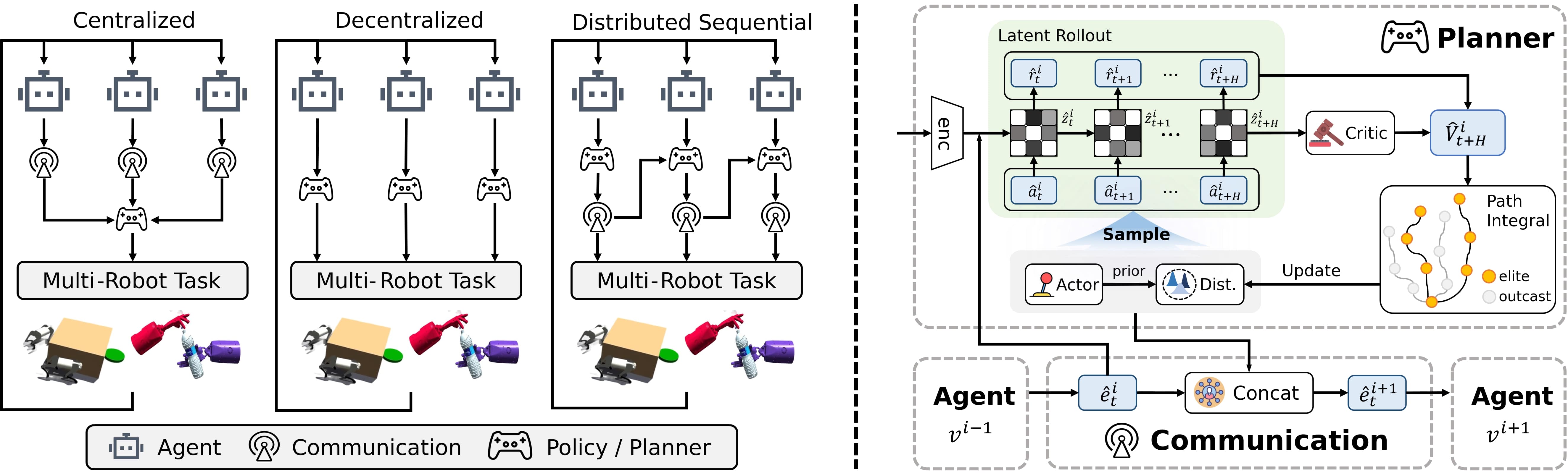
To address the difficulty of applying model-based reinforcement learning (MBRL) to multi-robot systems, we propose the Sequential World Model (SeqWM). This framework decomposes complex joint dynamics by using independent, sequentially-structured models for each agent. Planning and decision-making occur via sequential communication, where each agent bases its actions on the predictions of its predecessors. This design enables explicit intention sharing, boosts cooperative performance, and reduces communication complexity. Results show SeqWM outperforms state-of-the-art methods in simulations and real-world deployments, achieving advanced behaviors like predictive adaptation and role division.
⚙️ Installation
bashconda create -n seqwm python=3.8 -y conda activate seqwm pip install -r requirements.txt
If you encounter issues when installing Isaac Gym, Bi-DexHands or MQE please refer to Isaac Gym, Bi-DexHands and MQE.
🚀 Quick Start
For training, please run:
bashpython examples/train.py --load_config configs/dexhands/ShadowHandBottleCap/seqwm/config.json
You can modify the configuration in configs/{env_name}/{task_name}/seqwm/config.json to customize the training process.
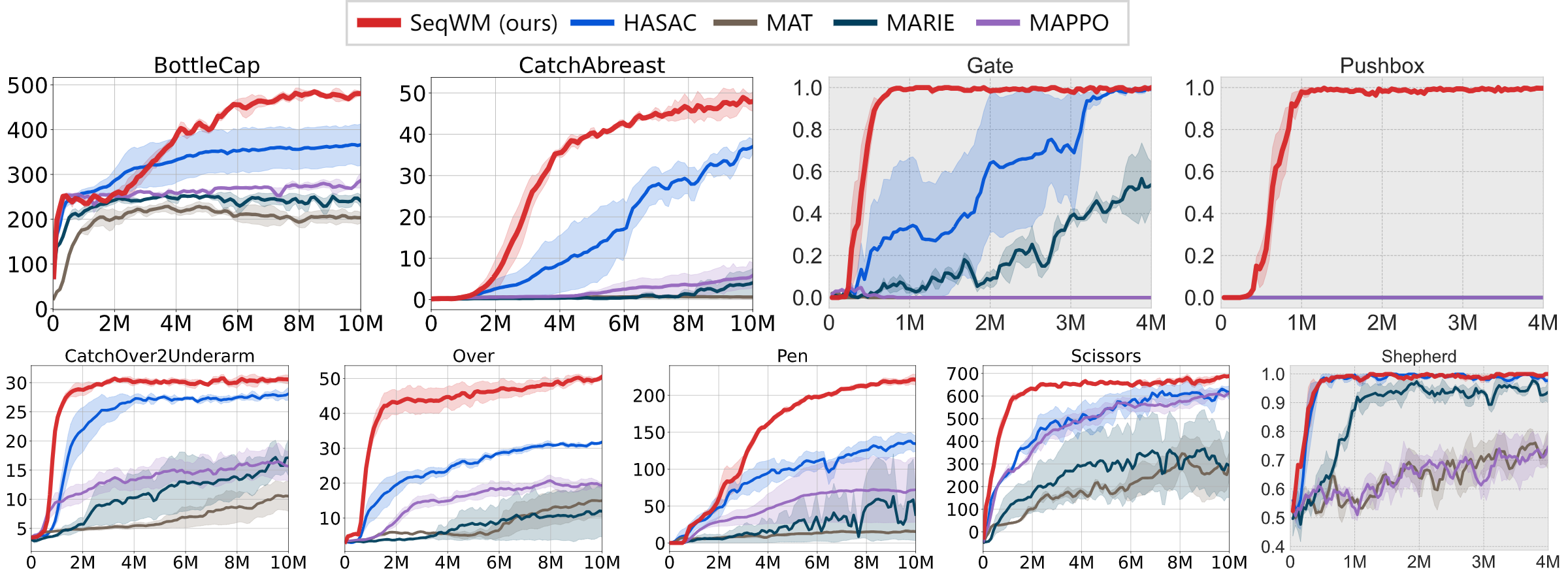
📈 Curves
SeqWM consistently outperforms state-of-the-art baselines in both Bi-DexHands and Multi-Quad environments.
🎥 Demos
👐 Bi-DexHands
These GIFs showcase SeqWM’s ability to solve complex bimanual manipulation tasks.
<p align="center"> <img src="assets/demo/sim_dexhands/over.gif" alt="Over" width="30%"/> <img src="assets/demo/sim_dexhands/catchabreast.gif" alt="Catch Abreast" width="30%"/> <img src="assets/demo/sim_dexhands/over2underarm.gif" alt="Over2Underarm" width="30%"/> <img src="assets/demo/sim_dexhands/bottlecap.gif" alt="BottleCap" width="30%"/> <img src="assets/demo/sim_dexhands/pen.gif" alt="Pen" width="30%"/> <img src="assets/demo/sim_dexhands/scissors.gif" alt="Scissors" width="30%"/> </p>🤖 Multi-Quadruped
In the Multi-Quad environment, SeqWM supports scalable cooperation among 2–5 quadruped robots.
<p align="center"> <img src="assets/demo/sim_quadruped/gate2.gif" alt="Gate-2robots" width="30%"/> <img src="assets/demo/sim_quadruped/gate3.gif" alt="Gate-3robots" width="30%"/> <img src="assets/demo/sim_quadruped/gate4.gif" alt="Gate-4robots" width="30%"/> <img src="assets/demo/sim_quadruped/gate5.gif" alt="Gate-5robots" width="30%"/> <img src="assets/demo/sim_quadruped/simbox.gif" alt="PushBox" width="30%"/> <img src="assets/demo/sim_quadruped/simsheep.gif" alt="Shepherd" width="30%"/> </p>🌍 Sim2Real Deployment
SeqWM has also been successfully deployed on real Unitree Go2-W robots, confirming effective sim-to-real transfer.
<p align="center"> <img src="assets/demo/real_go2w/gate.gif" alt="Gate-2robots" width="30%"/> <img src="assets/demo/real_go2w/pushbox.gif" alt="PushBox" width="30%"/> <img src="assets/demo/real_go2w/shepherd.gif" alt="Shepherd" width="30%"/> </p>🧩 Advanced Cooperative Behaviors
As shown below, the robots exhibit predictive yielding and temporal alignment: some agents slow down in front of the gate (observable as troughs in their x-axis velocity commands), while others accelerate and pass through first (peaks in velocity commands).
This wave-like pattern across agents reflects turn-taking and priority management, enabling smooth passage without collisions even in highly constrained environments.

🙏 Acknowledgement & 📜 Citation
Our code is built upon HARL, TDMPC2 and M3W. We thank all these authors for their nicely open sourced code and their great contributions to the community.
If you find our research helpful and would like to reference it in your work, please consider the following citations:
bibtex@inproceedings{ zhao2026seqwm, title = {Empowering Multi-Robot Cooperation via Sequential World Models}, author = {Zijie Zhao and Honglei Guo and Shengqian Chen and Kaixuan Xu and Bo Jiang and Yuanheng Zhu and Dongbin Zhao},, booktitle = {The Fourteenth International Conference on Learning Representations}, year = {2026}, url = {https://openreview.net/forum?id=IvUM6UwYCJ} }
Contributors
Showing top 1 contributor by commit count.

Related Repositories

atb033/multi_agent_path_planning
Python implementation of a bunch of multi-robot path-planning algorithms.

hasauino/rrt_exploration
A ROS package that implements a multi-robot RRT-based map exploration algorithm. It also has the image-based frontier detection that uses image processing to extract frontier points.

proroklab/VectorizedMultiAgentSimulator
VMAS is a vectorized differentiable simulator designed for efficient Multi-Agent Reinforcement Learning benchmarking. It is comprised of a vectorized 2D physics engine written in PyTorch and a set of challenging multi-robot scenarios. Additional scenarios can be implemented through a simple and modular interface.

ZJU-FAST-Lab/Swarm-Formation
Formation Flight in Dense Environments

luigifreda/3dmr
3D Multi-Robot Exploration, Patrolling and Navigation.

MISTLab/DOOR-SLAM
Distributed, Online, and Outlier Resilient SLAM for Robotic Teams