Mockway robotics
开源六轴协作机械臂系统,包含机械结构、电路和软件
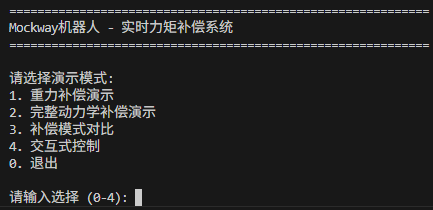
> 视频中测试程序为`tools/dynamics_test/real/inverse_dynamics_test.py`脚本 > > 运行后选择:1-重力补偿模式 > > 根据实际情况配置`tools/dynamics_test/dynamics_test.yaml`中串口等信息 The project is written primarily in Python, distributed under the MIT License license, first published in 2025. Key topics include: moveit2, pinocchio, robot, ros2.
牧卫机器人
开源六轴协作机械臂系统,包含机械结构、电路和软件
</div>中文 | English

视频中测试程序为
tools/dynamics_test/real/inverse_dynamics_test.py脚本运行后选择:1-重力补偿模式
根据实际情况配置
tools/dynamics_test/dynamics_test.yaml中串口等信息
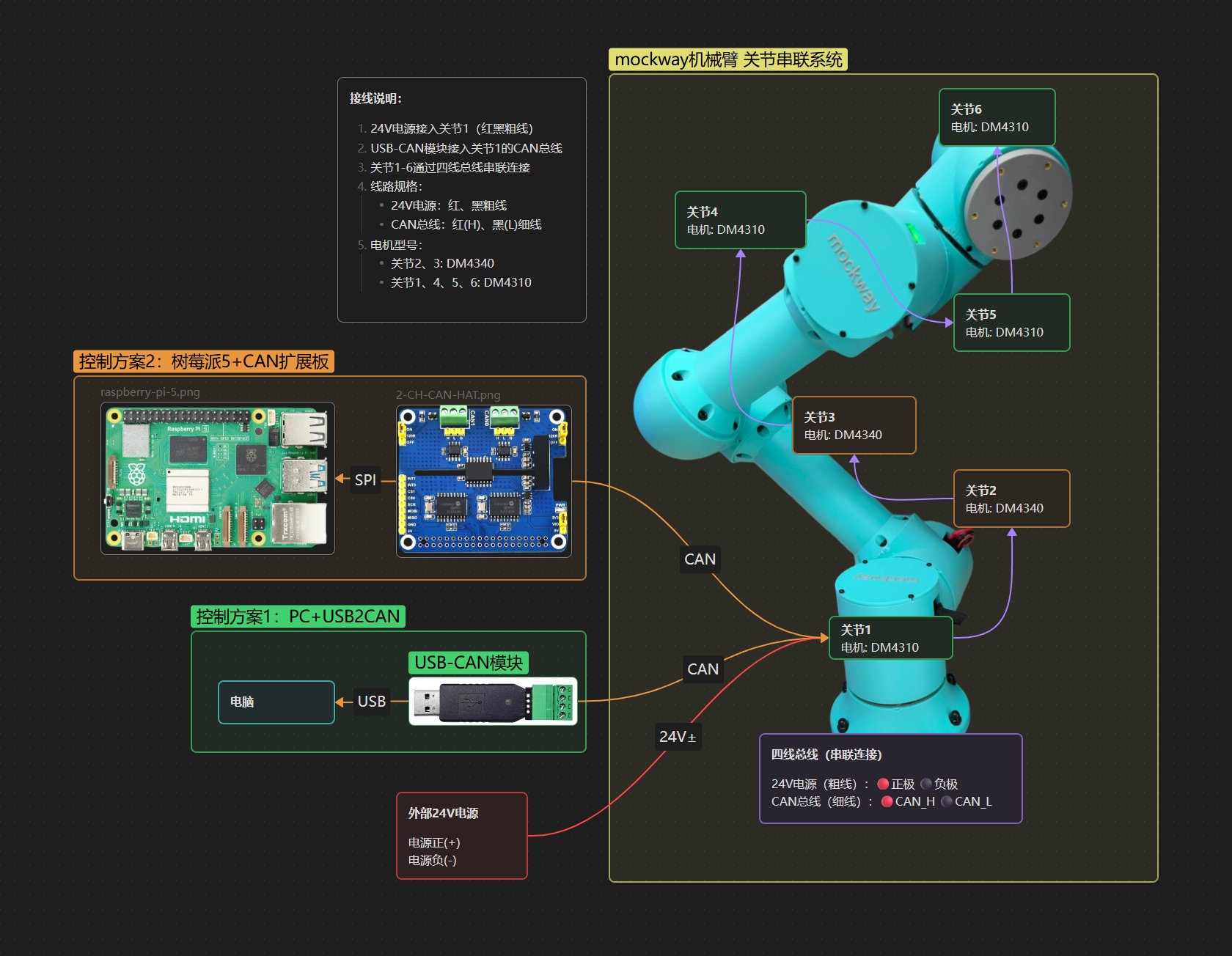
CAN设备使用维特USB-CAN模块,串口波特率921600,CAN总线波特率1M
⚙️ 机械结构
使用JellyCAD参数化建模,模型参数在/jellycad_src目录下,软件下载地址:JellyCAD v0.3.10
结构件可3D打印,已上传到MakerWorld
🚀 程序运行
🎮 电机调试
单个电机运动调试和关节零点标定的界面
bashpython tools/motor_gui/motor_gui.py

⚡ 力矩补偿
bashpython tools/dynamics_test/realtime_torque_compensation.py
运行前请阅读下面
⚠️ 注意事项
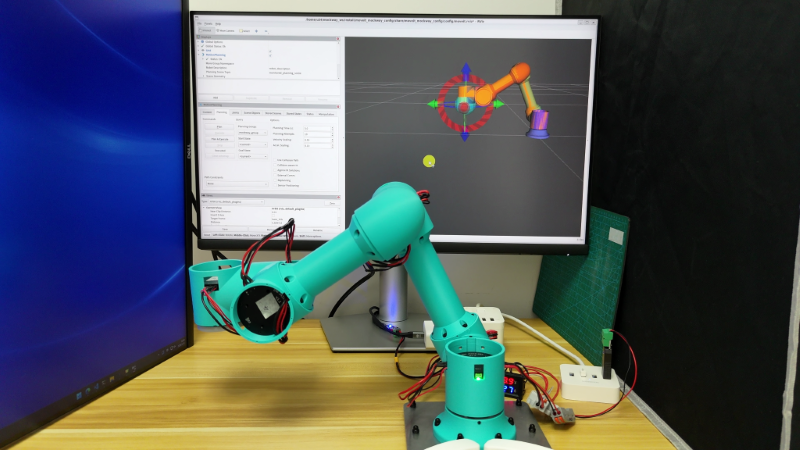
🦾 运行MoveIt!
建议运行环境:
- Ubuntu 24.04
- ROS2 Jazzy + MoveIt!
- 创建工作空间
bashmkdir -p ~/mockway_ws/src cd ~/mockway_ws/src
- 克隆mockway_robotics仓库
bashgit clone https://github.com/Jelatine/mockway_robotics.git
- 编译工作空间
bashcd ~/mockway_ws rosdep install --from-paths src/mockway_robotics/moveit_mockway_config/ --ignore-src -r -y colcon build --symlink-install --packages-select moveit_mockway_config
- 配置环境变量
bashsource ~/mockway_ws/install/setup.bash
- 启动程序
bashros2 launch moveit_mockway_config demo.launch.py
🖥️ 完整程序
- 安装
lua
bashsudo apt install liblua5.4-dev
- 构建
mockway_bringup
bashcd ~/mockway_ws rosdep install --from-paths src/mockway_robotics/ --ignore-src -r -y colcon build --symlink-install --packages-select mockway_bringup
- 启动程序
bash# 启动 move_group + servo ,仿真:use_mock_hardware:=true ros2 launch mockway_bringup bringup.launch.py use_mock_hardware:=true # 浏览器打开前端:http://localhost:8080/
🦞 OpenClaw应用
- 将skill文件放到openclaw的workspace目录下
- 对话时让大模型学习skill文件中的指令,以及机械臂控制器的IP地址(或主机名)
- 用自然语言控制机械臂,如:直线向上移动10厘米
📦 物料清单
详细的物料清单请查看:BOM.md
复刻成本约4.2k(电机≈4k,打印件≈20,USB2CAN≈73,电源≈100,螺丝及工具<40)
🔌 电气连接
⚠️ 注意事项
重要提示:力矩模式如果前期准备没做好容易发生飞车(失控)现象,请务必按照以下步骤操作。
1. 结构匹配
确保机械结构与URDF模型一致。GitHub仓库最新版本已包含所有必需的结构件。
2. 关节零点标定
使用电机调试界面标定各关节零点位置,零点姿态需参考URDF定义。
<img src="doc/img/calibrate_joint.jpg" alt="calibrate_joint" style="zoom: 50%;" />bashpython tools/motor_gui/motor_gui.py
3. 力矩值验证
在代码中注释掉controller.enable_motors(),先运行程序观察计算的力矩值是否正常。有条件的话,建议先运行一次位置模式,对比实际力矩与算法计算力矩的差异是否较小。
4. 重力补偿测试
初次测试时:
- 使用模式1(重力补偿模式)进行测试
- 增加电机阻尼参数:设置
mit_params.kd = 1
5. 结构件打印
3D打印结构件时注意:
- 提高填充百分比(建议≥40%)
- 使用螺旋体(Gyroid)填充图案,以提高强度和减轻重量
Contributors
Showing top 1 contributor by commit count.

Related Repositories

enactic/openarm
A fully open-source humanoid arm for physical AI research and deployment in contact-rich environments.

robosoft-ai/SMACC2
An Event-Driven, Asynchronous, Behavioral State Machine Library for ROS2 (Robotic Operating System) applications written in C++

AndrejOrsula/pymoveit2
Basic Python interface for MoveIt 2 built on top of ROS 2 actions and services

IFRA-Cranfield/ros2_RobotSimulation
ROS2.0 Foxy and Humble repositories which provide ready-to-use ROS2.0 Gazebo + MoveIt!2 simulation packages for different Industrial and Collaborative Robots.
IFRA-Cranfield/ros2_SimRealRobotControl
This repository provides ready-to-use ROS2 (Humble) packages to execute simple programs and sequences and control different Industrial and Collaborative Robots using ROS 2.
NVIDIA-ISAAC-ROS/isaac_ros_cumotion
NVIDIA-accelerated packages for arm motion planning and control